|
NinjaFlight
|
|
NinjaFlight
|
#include <ninja.h>
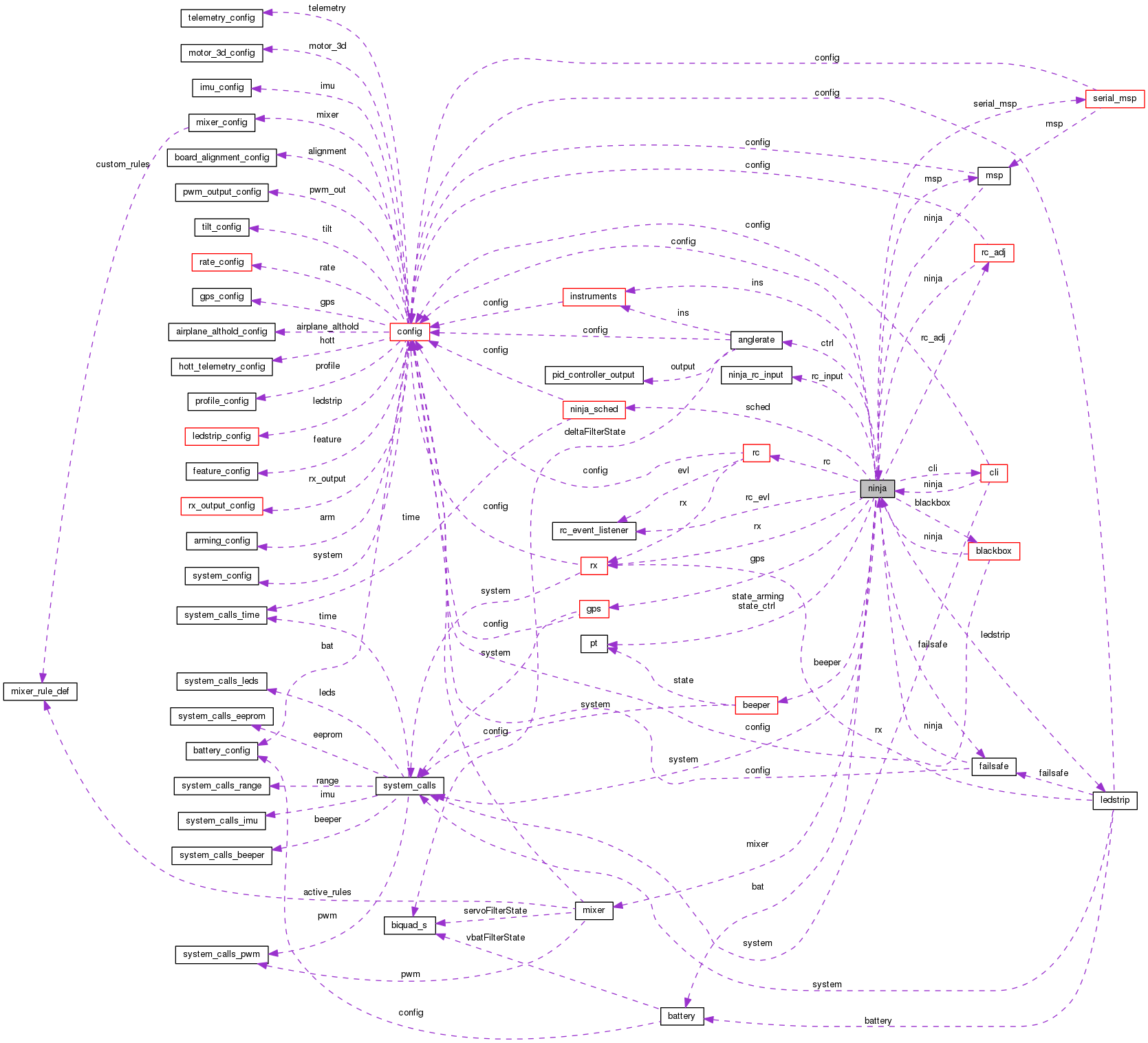
Data Fields | |
| struct instruments | ins |
| struct mixer | mixer |
| struct anglerate | ctrl |
| struct battery | bat |
| struct blackbox | blackbox |
| struct rc | rc |
| struct rc_event_listener | rc_evl |
| struct rx | rx |
| struct rc_adj | rc_adj |
| struct failsafe | failsafe |
| struct ledstrip | ledstrip |
| struct beeper | beeper |
| struct cli | cli |
| struct gps | gps |
| struct serial_msp | serial_msp |
| struct msp | msp |
| bool | isRXDataNew |
| int16_t | magHold |
| int16_t | headFreeModeHold |
| uint8_t | motorControlEnable |
| int16_t | telemTemperature1 |
| uint32_t | disarmAt |
| uint16_t | filteredCycleTime |
| uint16_t | cycleTime |
| struct ninja_rc_input | rc_input |
| struct pt | state_ctrl |
| struct pt | state_arming |
| sys_millis_t | arming_delay |
| sys_millis_t | disarm_timeout |
| bool | is_armed |
| uint32_t | sensors |
| sys_micros_t | loop_time |
| struct ninja_sched | sched |
| uint16_t | direct_outputs [MIXER_OUTPUT_COUNT] |
| this is used for directly controlling motors while we are disarmed (from gcs) More... | |
| const struct system_calls * | system |
| struct config * | config |
| pointer to current configuration More... | |
| sys_millis_t ninja::arming_delay |
| struct battery ninja::bat |
| struct beeper ninja::beeper |
| struct blackbox ninja::blackbox |
| struct cli ninja::cli |
| struct config* ninja::config |
pointer to current configuration
| struct anglerate ninja::ctrl |
| uint16_t ninja::cycleTime |
| uint16_t ninja::direct_outputs[MIXER_OUTPUT_COUNT] |
this is used for directly controlling motors while we are disarmed (from gcs)
| sys_millis_t ninja::disarm_timeout |
| uint32_t ninja::disarmAt |
| struct failsafe ninja::failsafe |
| uint16_t ninja::filteredCycleTime |
| struct gps ninja::gps |
| int16_t ninja::headFreeModeHold |
| struct instruments ninja::ins |
| bool ninja::is_armed |
| bool ninja::isRXDataNew |
| struct ledstrip ninja::ledstrip |
| sys_micros_t ninja::loop_time |
| int16_t ninja::magHold |
| struct mixer ninja::mixer |
| uint8_t ninja::motorControlEnable |
| struct msp ninja::msp |
| struct rc ninja::rc |
| struct rc_adj ninja::rc_adj |
| struct rc_event_listener ninja::rc_evl |
| struct ninja_rc_input ninja::rc_input |
| struct rx ninja::rx |
| struct ninja_sched ninja::sched |
| uint32_t ninja::sensors |
| struct serial_msp ninja::serial_msp |
| struct pt ninja::state_arming |
| struct pt ninja::state_ctrl |
| const struct system_calls* ninja::system |
| int16_t ninja::telemTemperature1 |
 1.8.7
1.8.7 
