|
NinjaFlight
|
|
NinjaFlight
|
#include <anglerate.h>
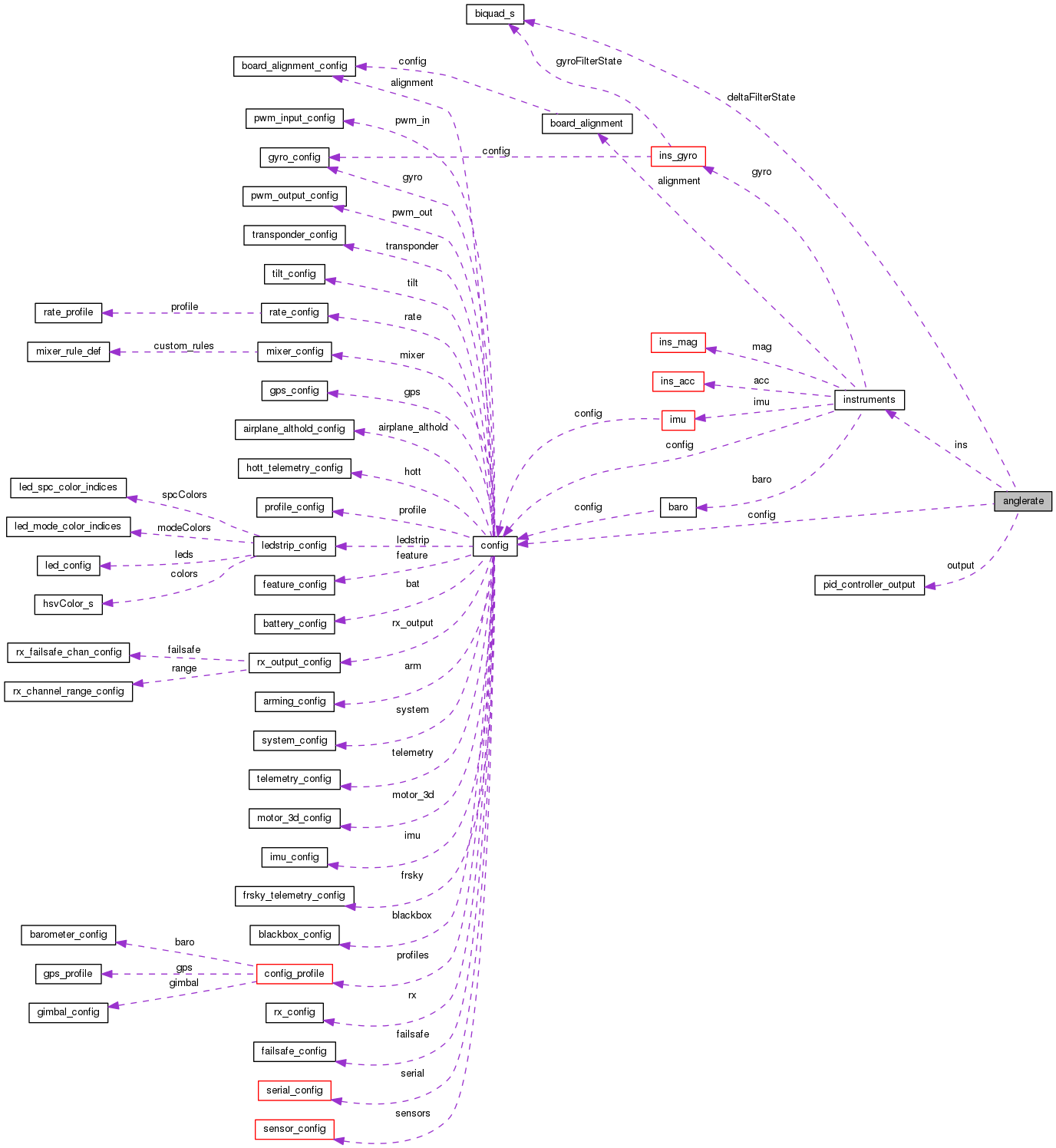
Data Fields | |
| uint8_t | PIDweight [3] |
| int32_t | lastITerm [3] |
| int32_t | ITermLimit [3] |
| float | lastITermf [3] |
| float | ITermLimitf [3] |
| biquad_t | deltaFilterState [3] |
| void(* | update )(struct anglerate *self, float dT) |
| int16_t | body_rates [3] |
| int16_t | body_angles [3] |
| int16_t | user [3] |
| user input command More... | |
| float | lastRateForDelta [3] |
| float | deltaStatef [3][DTERM_AVERAGE_COUNT] |
| int32_t | ITermAngle [2] |
| uint8_t | pidScale [3] |
| int32_t | lastRateForDeltai [3] |
| int32_t | deltaStatei [3][DTERM_AVERAGE_COUNT] |
| struct pid_controller_output | output |
| bool | _delta_state_set |
| uint16_t | max_angle_inclination |
| uint8_t | level_percent [2] |
| uint8_t | flags |
| struct instruments * | ins |
| const struct config * | config |
| bool anglerate::_delta_state_set |
| int16_t anglerate::body_angles[3] |
| int16_t anglerate::body_rates[3] |
| const struct config* anglerate::config |
| biquad_t anglerate::deltaFilterState[3] |
| float anglerate::deltaStatef[3][DTERM_AVERAGE_COUNT] |
| int32_t anglerate::deltaStatei[3][DTERM_AVERAGE_COUNT] |
| uint8_t anglerate::flags |
| struct instruments* anglerate::ins |
| int32_t anglerate::ITermAngle[2] |
| int32_t anglerate::ITermLimit[3] |
| float anglerate::ITermLimitf[3] |
| int32_t anglerate::lastITerm[3] |
| float anglerate::lastITermf[3] |
| float anglerate::lastRateForDelta[3] |
| int32_t anglerate::lastRateForDeltai[3] |
| uint8_t anglerate::level_percent[2] |
| uint16_t anglerate::max_angle_inclination |
| struct pid_controller_output anglerate::output |
| uint8_t anglerate::pidScale[3] |
| uint8_t anglerate::PIDweight[3] |
| void(* anglerate::update)(struct anglerate *self, float dT) |
| int16_t anglerate::user[3] |
user input command
 1.8.7
1.8.7 
