|
NinjaFlight
|
|
NinjaFlight
|
#include <config.h>
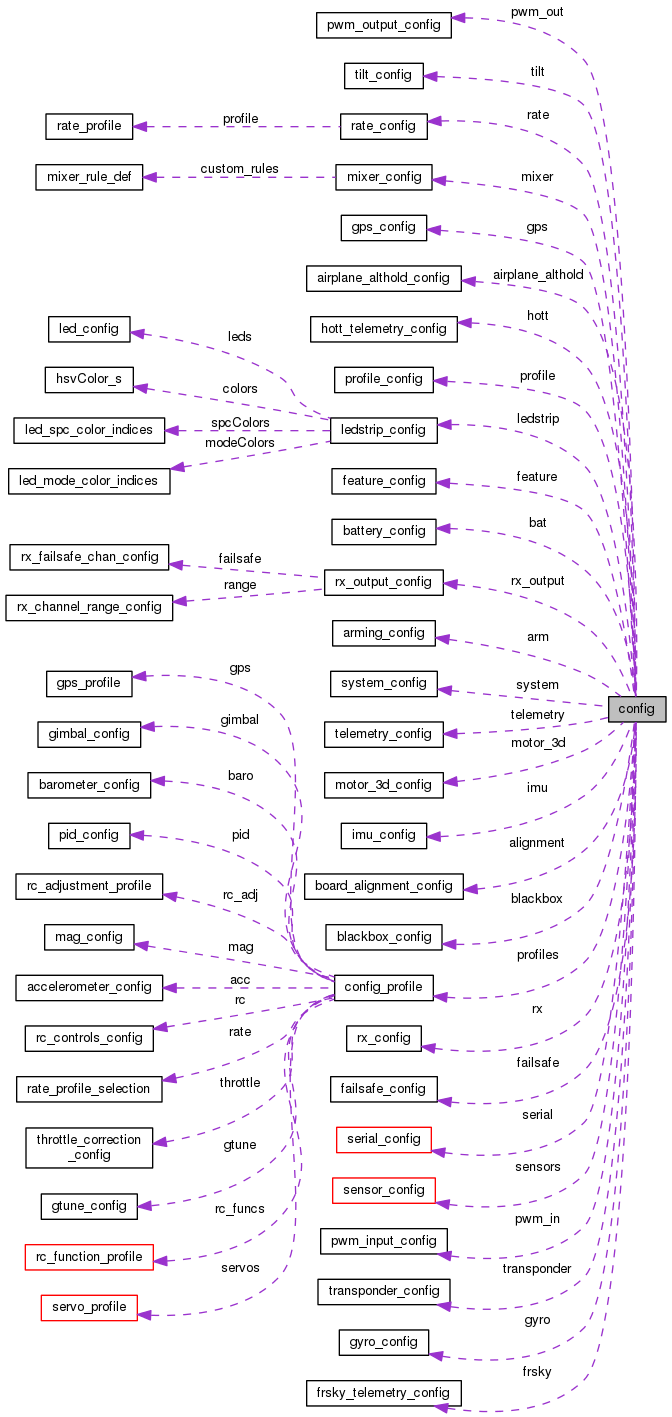
Data Fields | |
| struct profile_config | profile |
| struct gyro_config | gyro |
| struct config_profile | profiles [MAX_PROFILE_COUNT] |
| struct airplane_althold_config | airplane_althold |
| struct battery_config | bat |
| struct blackbox_config | blackbox |
| struct board_alignment_config | alignment |
| struct system_config | system |
| struct failsafe_config | failsafe |
| struct feature_config | feature |
| struct frsky_telemetry_config | frsky |
| struct hott_telemetry_config | hott |
| struct gps_config | gps |
| struct imu_config | imu |
| struct ledstrip_config | ledstrip |
| struct mixer_config | mixer |
| struct motor_3d_config | motor_3d |
| struct pwm_output_config | pwm_out |
| struct pwm_input_config | pwm_in |
| struct rate_config | rate |
| struct arming_config | arm |
| struct rx_config | rx |
| struct rx_output_config | rx_output |
| struct sensor_config | sensors |
| struct serial_config | serial |
| struct telemetry_config | telemetry |
| struct tilt_config | tilt |
| struct transponder_config | transponder |
| struct airplane_althold_config config::airplane_althold |
| struct board_alignment_config config::alignment |
| struct arming_config config::arm |
| struct battery_config config::bat |
| struct blackbox_config config::blackbox |
| struct failsafe_config config::failsafe |
| struct feature_config config::feature |
| struct frsky_telemetry_config config::frsky |
| struct gps_config config::gps |
| struct gyro_config config::gyro |
| struct hott_telemetry_config config::hott |
| struct imu_config config::imu |
| struct ledstrip_config config::ledstrip |
| struct mixer_config config::mixer |
| struct motor_3d_config config::motor_3d |
| struct profile_config config::profile |
| struct config_profile config::profiles[MAX_PROFILE_COUNT] |
| struct pwm_input_config config::pwm_in |
| struct pwm_output_config config::pwm_out |
| struct rate_config config::rate |
| struct rx_config config::rx |
| struct rx_output_config config::rx_output |
| struct sensor_config config::sensors |
| struct serial_config config::serial |
| struct system_config config::system |
| struct telemetry_config config::telemetry |
| struct tilt_config config::tilt |
| struct transponder_config config::transponder |
 1.8.7
1.8.7 
