|
NinjaFlight
|
|
NinjaFlight
|
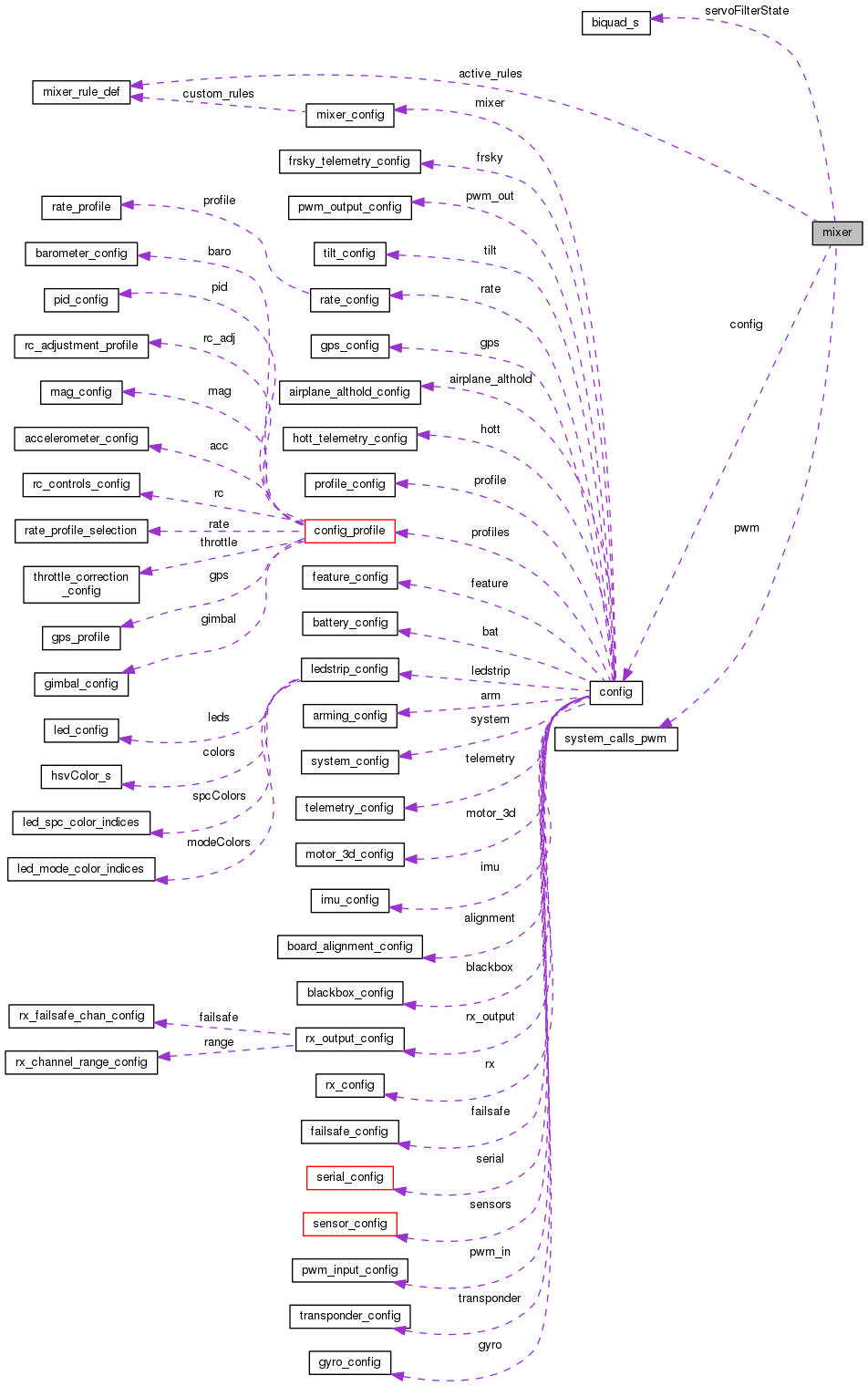
#include <mixer.h>
Data Fields | |
| int16_t | input [MIXER_INPUT_COUNT] |
| uint8_t | flags |
| uint8_t | motorCount |
| output count in current configuration being used by the mixer More... | |
| uint8_t | servoCount |
| uint8_t | ruleCount |
| bool | motorLimitReached |
| uint8_t | mode |
| currently used mixer mode More... | |
| struct mixer_rule_def | active_rules [MIXER_MAX_RULES] |
| int16_t | midthrottle |
| output offset, min and max for motors More... | |
| int16_t | minthrottle |
| int16_t | maxthrottle |
| biquad_t | servoFilterState [MAX_SUPPORTED_SERVOS] |
| const struct config * | config |
| const struct system_calls_pwm * | pwm |
| struct mixer_rule_def mixer::active_rules[MIXER_MAX_RULES] |
| const struct config* mixer::config |
| uint8_t mixer::flags |
| int16_t mixer::input[MIXER_INPUT_COUNT] |
| int16_t mixer::maxthrottle |
| int16_t mixer::midthrottle |
output offset, min and max for motors
| int16_t mixer::minthrottle |
| uint8_t mixer::mode |
currently used mixer mode
| uint8_t mixer::motorCount |
output count in current configuration being used by the mixer
| bool mixer::motorLimitReached |
| const struct system_calls_pwm* mixer::pwm |
| uint8_t mixer::ruleCount |
| uint8_t mixer::servoCount |
| biquad_t mixer::servoFilterState[MAX_SUPPORTED_SERVOS] |
 1.8.7
1.8.7 
