|
NinjaFlight
|
|
NinjaFlight
|

|
Macros | |
| #define | SPIN_RATE_LIMIT 20 |
Enumerations | |
| enum | { IMU_FLAG_USE_ACC = (1 << 0), IMU_FLAG_USE_MAG = (1 << 1), IMU_FLAG_USE_YAW = (1 << 2), IMU_FLAG_DCM_CONVERGE_FASTER = (1 << 3) } |
Functions | |
| void | imu_reset (struct imu *self) |
| void | imu_init (struct imu *self, const struct config *config) |
| void | imu_reset_velocity_estimate (struct imu *self) |
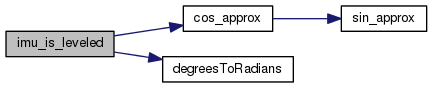
| bool | imu_is_leveled (struct imu *self, uint8_t max_angle) |
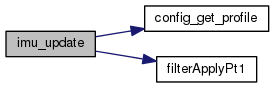
| void | imu_update (struct imu *self, float dt) |
| void | imu_input_accelerometer (struct imu *self, int16_t x, int16_t y, int16_t z) |
| void | imu_input_magnetometer (struct imu *self, int16_t x, int16_t y, int16_t z) |
| void | imu_input_gyro (struct imu *self, int16_t x, int16_t y, int16_t z) |
| void | imu_input_yaw_dd (struct imu *self, int16_t yaw) |
| void | imu_get_rotation (struct imu *self, quat_t *q) |
| float | imu_get_cos_tilt_angle (struct imu *self) |
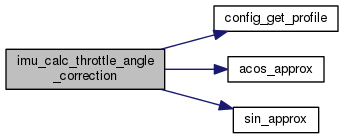
| int16_t | imu_calc_throttle_angle_correction (struct imu *self, uint8_t throttle_correction_value) |
| void | imu_get_attitude_dd (struct imu *self, union attitude_euler_angles *att) |
| void | imu_get_gyro (struct imu *self, int16_t gyr[3]) |
| float | imu_get_gyro_scale (struct imu *self) |
| void | imu_get_raw_accel (struct imu *self, union imu_accel_reading *accel) |
| int16_t | imu_get_roll_dd (struct imu *self) |
| int16_t | imu_get_pitch_dd (struct imu *self) |
| int16_t | imu_get_yaw_dd (struct imu *self) |
| float | imu_get_velocity_integration_time (struct imu *self) |
| float | imu_get_avg_vertical_accel_cmss (struct imu *self) |
| float | imu_get_est_vertical_vel_cms (struct imu *self) |
| void | imu_enable_fast_dcm_convergence (struct imu *self, bool on) |
| #define SPIN_RATE_LIMIT 20 |
| anonymous enum |
| int16_t imu_calc_throttle_angle_correction | ( | struct imu * | self, |
| uint8_t | throttle_correction_value | ||
| ) |
| void imu_enable_fast_dcm_convergence | ( | struct imu * | self, |
| bool | on | ||
| ) |
| void imu_get_attitude_dd | ( | struct imu * | self, |
| union attitude_euler_angles * | att | ||
| ) |
| float imu_get_avg_vertical_accel_cmss | ( | struct imu * | self | ) |
| float imu_get_cos_tilt_angle | ( | struct imu * | self | ) |
| float imu_get_est_vertical_vel_cms | ( | struct imu * | self | ) |
| void imu_get_gyro | ( | struct imu * | self, |
| int16_t | gyr[3] | ||
| ) |
| float imu_get_gyro_scale | ( | struct imu * | self | ) |
| int16_t imu_get_pitch_dd | ( | struct imu * | self | ) |
| void imu_get_raw_accel | ( | struct imu * | self, |
| union imu_accel_reading * | accel | ||
| ) |
| int16_t imu_get_roll_dd | ( | struct imu * | self | ) |
| float imu_get_velocity_integration_time | ( | struct imu * | self | ) |
| int16_t imu_get_yaw_dd | ( | struct imu * | self | ) |

| void imu_input_accelerometer | ( | struct imu * | self, |
| int16_t | x, | ||
| int16_t | y, | ||
| int16_t | z | ||
| ) |
| void imu_input_gyro | ( | struct imu * | self, |
| int16_t | x, | ||
| int16_t | y, | ||
| int16_t | z | ||
| ) |
| void imu_input_magnetometer | ( | struct imu * | self, |
| int16_t | x, | ||
| int16_t | y, | ||
| int16_t | z | ||
| ) |
| void imu_input_yaw_dd | ( | struct imu * | self, |
| int16_t | yaw | ||
| ) |
| bool imu_is_leveled | ( | struct imu * | self, |
| uint8_t | max_angle | ||
| ) |
| void imu_reset | ( | struct imu * | self | ) |
| void imu_reset_velocity_estimate | ( | struct imu * | self | ) |
| void imu_update | ( | struct imu * | self, |
| float | dt | ||
| ) |
 1.8.7
1.8.7 
