|
NinjaFlight
|
|
NinjaFlight
|
#include <math.h>#include <stdio.h>#include <stdint.h>#include <stdbool.h>#include <string.h>#include "system_calls.h"#include "target.h"#include "drivers/system.h"#include "common/maths.h"#include "common/axis.h"#include "common/color.h"#include "common/utils.h"#include "common/filter.h"#include "config/config.h"#include "config/profile.h"#include "config/tilt.h"#include "io/rc_adjustments.h"#include "sensors/sonar.h"#include "sensors/compass.h"#include "sensors/acceleration.h"#include "sensors/gyro.h"#include "sensors/battery.h"#include "sensors/initialisation.h"#include "io/beeper.h"#include "io/display.h"#include "io/ledstrip.h"#include "io/serial.h"#include "io/serial_msp.h"#include "io/statusindicator.h"#include "io/transponder_ir.h"#include "rx/rx.h"#include "rx/msp.h"#include "telemetry/telemetry.h"#include "flight/rate_profile.h"#include "flight/mixer.h"#include "flight/anglerate.h"#include "flight/altitudehold.h"#include "flight/failsafe.h"#include "flight/gtune.h"#include "flight/navigation.h"#include "flight/tilt.h"#include "sensors/instruments.h"#include "sensors/gps.h"#include "config/feature.h"#include "msp.h"#include "ninjaflight.h"#include "ninja.h"#include "ninja_sched.h"
Functions | |
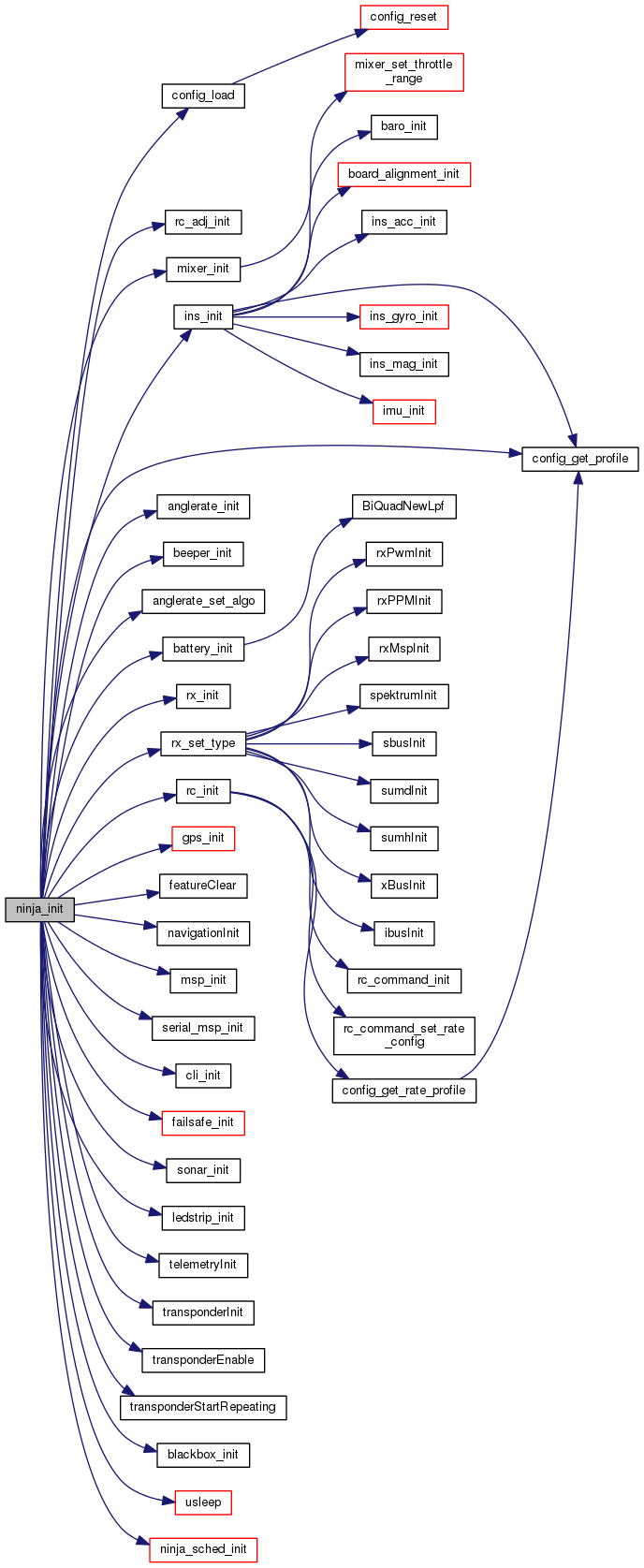
| void | ninja_init (struct ninja *self, const struct system_calls *syscalls, struct config *config) |
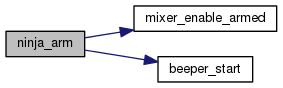
| void | ninja_arm (struct ninja *self) |
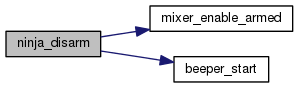
| void | ninja_disarm (struct ninja *self) |
| uint32_t | ninja_has_sensors (struct ninja *self, sensor_mask_t sensor_mask) |
| bool | ninja_is_armed (struct ninja *self) |
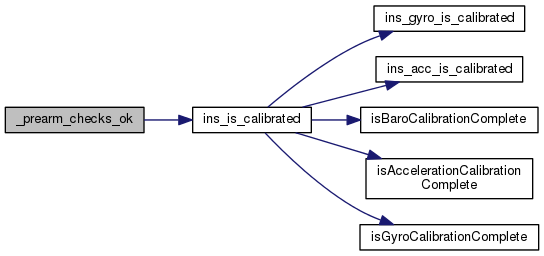
| bool | _prearm_checks_ok (struct ninja *self) |
| bool | _disarm_checks_ok (struct ninja *self) |
| void | ninja_run_pid_loop (struct ninja *self, uint32_t dt_us) |
| void | ninja_heartbeat (struct ninja *self) |
| bool _disarm_checks_ok | ( | struct ninja * | self | ) |
| bool _prearm_checks_ok | ( | struct ninja * | self | ) |
| void ninja_arm | ( | struct ninja * | self | ) |
| void ninja_disarm | ( | struct ninja * | self | ) |
| uint32_t ninja_has_sensors | ( | struct ninja * | self, |
| sensor_mask_t | sensor_mask | ||
| ) |
| void ninja_heartbeat | ( | struct ninja * | self | ) |

| void ninja_init | ( | struct ninja * | self, |
| const struct system_calls * | syscalls, | ||
| struct config * | config | ||
| ) |
| bool ninja_is_armed | ( | struct ninja * | self | ) |
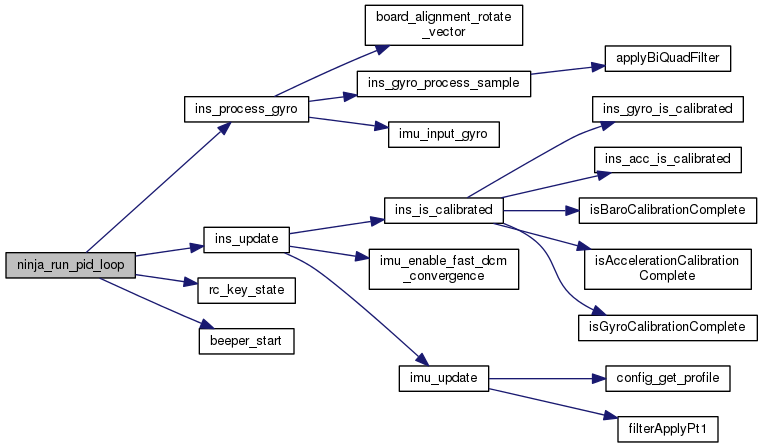
| void ninja_run_pid_loop | ( | struct ninja * | self, |
| uint32_t | dt_us | ||
| ) |
 1.8.7
1.8.7 
