Go to the source code of this file.
|
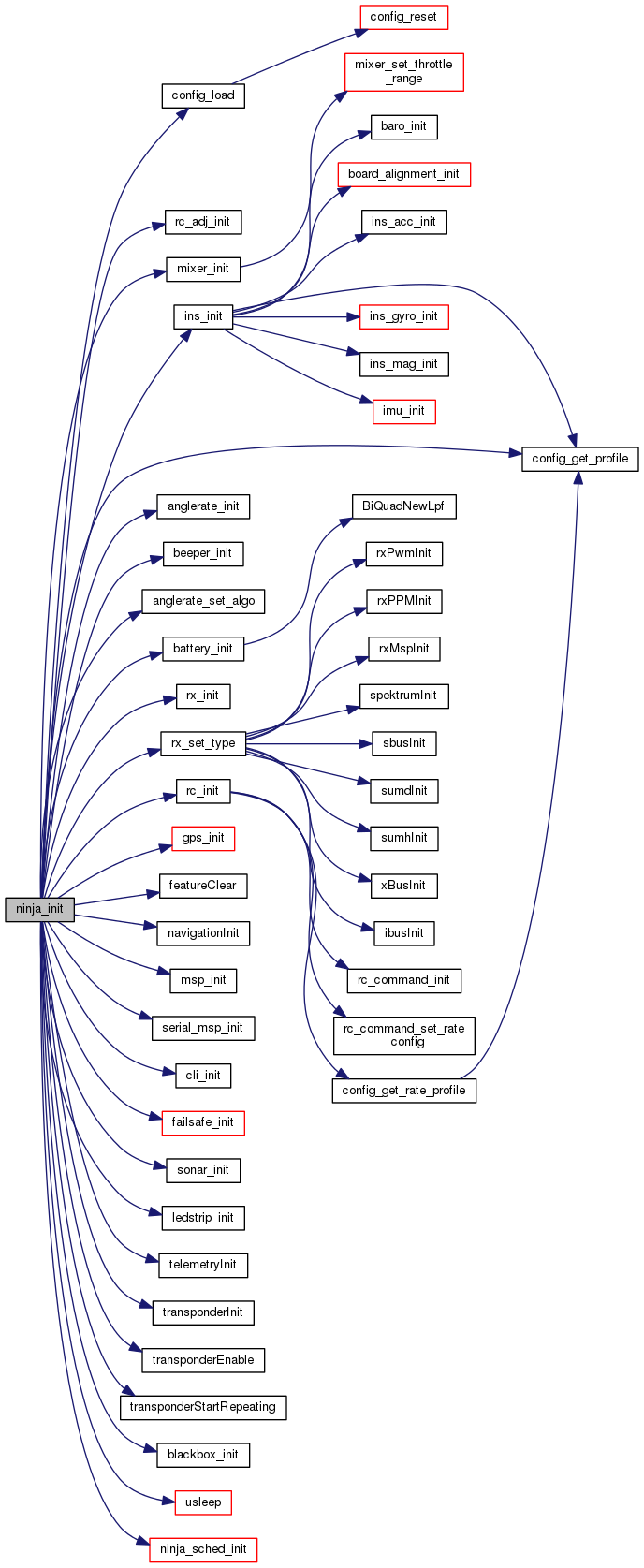
| void | ninja_init (struct ninja *self, const struct system_calls *syscalls, struct config *config) |
| |
| void | ninja_arm (struct ninja *self) |
| |
| void | ninja_disarm (struct ninja *self) |
| |
| uint32_t | ninja_has_sensors (struct ninja *self, sensor_mask_t sensor_mask) |
| |
| bool | ninja_is_armed (struct ninja *self) |
| |
| void | ninja_heartbeat (struct ninja *self) |
| |
| void | ninja_input_rc (struct ninja *self, const struct ninja_rc_input *rc) |
| |
| void | ninja_input_gyro (struct ninja *self, int32_t x, int32_t y, int32_t z) |
| |
| void | ninja_input_acc (struct ninja *self, int32_t x, int32_t y, int32_t z) |
| |
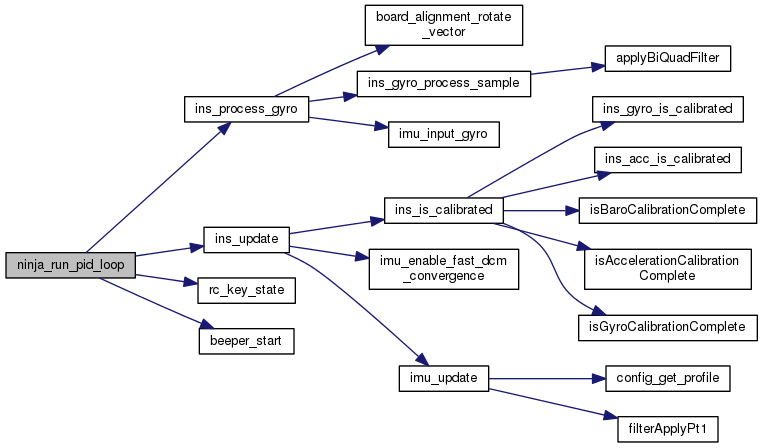
| void | ninja_run_pid_loop (struct ninja *self, uint32_t dt_us) |
| |
| Enumerator |
|---|
| NINJA_SENSOR_GYRO |
|
| NINJA_SENSOR_ACC |
|
| NINJA_SENSOR_MAG |
|
| NINJA_SENSOR_GPS |
|
| NINJA_SENSOR_BARO |
|
| NINJA_SENSOR_SONAR |
|
| void ninja_arm |
( |
struct ninja * |
self | ) |
|
| void ninja_disarm |
( |
struct ninja * |
self | ) |
|
| void ninja_heartbeat |
( |
struct ninja * |
self | ) |
|
| void ninja_input_acc |
( |
struct ninja * |
self, |
|
|
int32_t |
x, |
|
|
int32_t |
y, |
|
|
int32_t |
z |
|
) |
| |
| void ninja_input_gyro |
( |
struct ninja * |
self, |
|
|
int32_t |
x, |
|
|
int32_t |
y, |
|
|
int32_t |
z |
|
) |
| |
| bool ninja_is_armed |
( |
struct ninja * |
self | ) |
|
| void ninja_run_pid_loop |
( |
struct ninja * |
self, |
|
|
uint32_t |
dt_us |
|
) |
| |



 1.8.7
1.8.7 
