|
NinjaFlight
|
|
NinjaFlight
|
#include <stdbool.h>#include <stdint.h>#include <stdlib.h>#include <string.h>#include <platform.h>#include "system_calls.h"#include "build_config.h"#include "debug.h"#include "common/axis.h"#include "common/color.h"#include "common/maths.h"#include "common/printf.h"#include "common/streambuf.h"#include "config/feature.h"#include "drivers/nvic.h"#include "drivers/sensor.h"#include "drivers/system.h"#include "drivers/dma.h"#include "drivers/gpio.h"#include "drivers/config_flash.h"#include "drivers/light_led.h"#include "drivers/sound_beeper.h"#include "drivers/timer.h"#include "drivers/serial.h"#include "drivers/serial_softserial.h"#include "drivers/serial_uart.h"#include "drivers/accgyro.h"#include "drivers/compass.h"#include "drivers/pwm_mapping.h"#include "drivers/pwm_rx.h"#include "drivers/adc.h"#include "drivers/bus_i2c.h"#include "drivers/bus_spi.h"#include "drivers/inverter.h"#include "drivers/pwm_output.h"#include "drivers/flash_m25p16.h"#include "drivers/sonar_hcsr04.h"#include "drivers/sdcard.h"#include "drivers/usb_io.h"#include "drivers/transponder_ir.h"#include "drivers/gyro_sync.h"#include "drivers/flashfs.h"#include "drivers/asyncfatfs/asyncfatfs.h"#include "rx/rx.h"#include "rx/spektrum.h"#include "io/serial.h"#include "io/ledstrip.h"#include "io/display.h"#include "io/transponder_ir.h"#include "io/serial_msp.h"#include "sensors/sonar.h"#include "sensors/barometer.h"#include "sensors/compass.h"#include "sensors/acceleration.h"#include "sensors/gyro.h"#include "sensors/battery.h"#include "sensors/boardalignment.h"#include "sensors/initialisation.h"#include "sensors/instruments.h"#include "telemetry/telemetry.h"#include "blackbox/blackbox.h"#include "flight/anglerate.h"#include "flight/mixer.h"#include "flight/failsafe.h"#include "flight/navigation.h"#include "config/config.h"#include "ninjaflight.h"Macros | |
| #define | processLoopback() |
Enumerations | |
| enum | systemState_e { SYSTEM_STATE_INITIALISING = 0, SYSTEM_STATE_CONFIG_LOADED = (1 << 0), SYSTEM_STATE_SENSORS_READY = (1 << 1), SYSTEM_STATE_MOTORS_READY = (1 << 2), SYSTEM_STATE_TRANSPONDER_ENABLED = (1 << 3), SYSTEM_STATE_READY = (1 << 7) } |
Functions | |
| const struct sonar_hardware * | sonarGetHardwareConfiguration (current_sensor_type_t currentMeterType) |
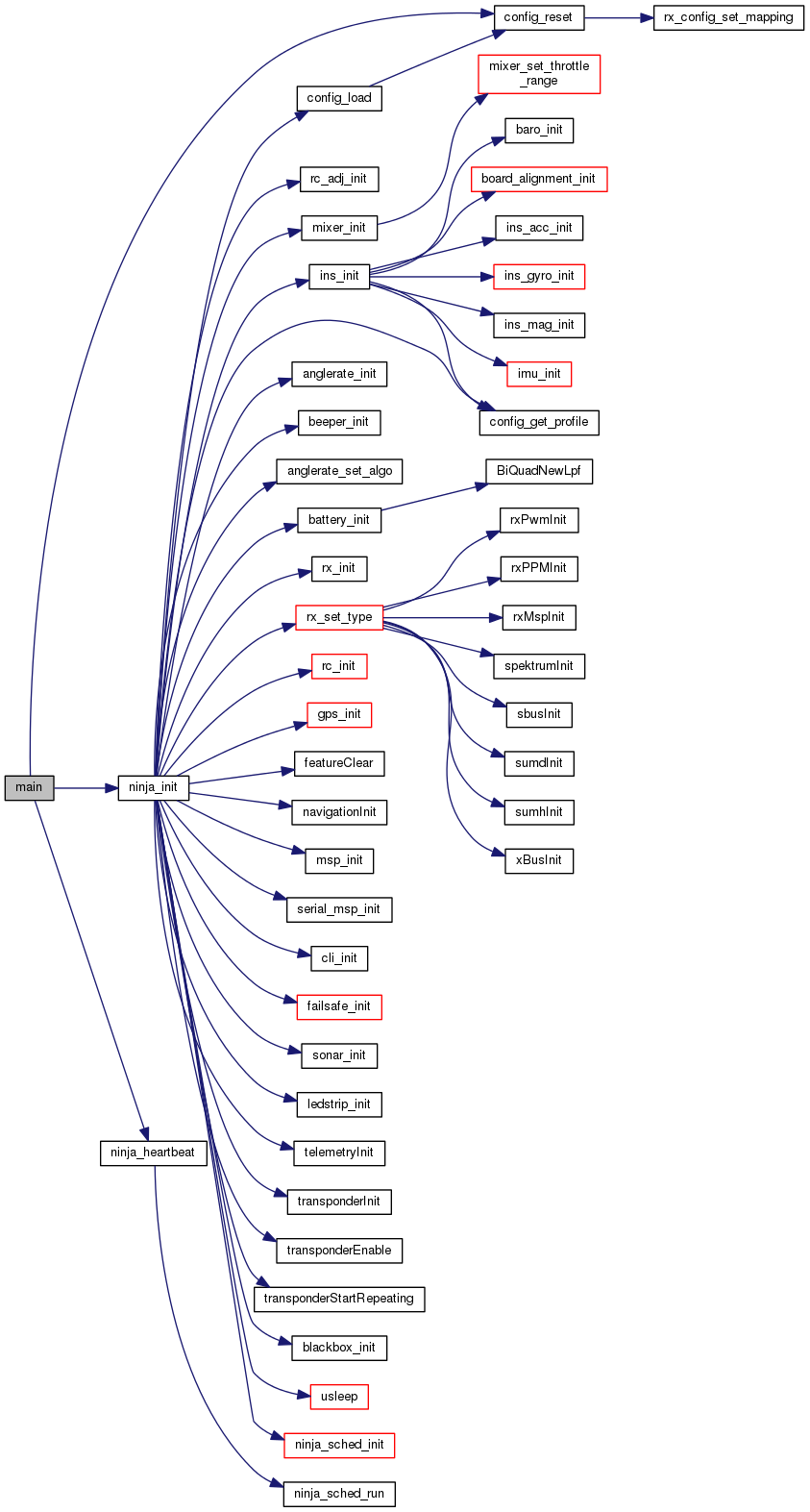
| int | main (void) |
| void | HardFault_Handler (void) |
Variables | |
| uint32_t | currentTime |
| #define processLoopback | ( | ) |
| enum systemState_e |
| void HardFault_Handler | ( | void | ) |

| int main | ( | void | ) |
| const struct sonar_hardware* sonarGetHardwareConfiguration | ( | current_sensor_type_t | currentMeterType | ) |
| uint32_t currentTime |
 1.8.7
1.8.7 
