|
NinjaFlight
|
|
NinjaFlight
|
#include <gyro.h>
Data Fields | |
| sensor_align_e | align |
| int32_t | gyroADC [XYZ_AXIS_COUNT] |
| uint16_t | calibratingG |
| int32_t | gyroZero [XYZ_AXIS_COUNT] |
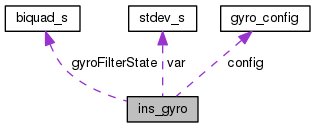
| biquad_t | gyroFilterState [3] |
| bool | use_filter |
| int32_t | g [3] |
| stdev_t | var [3] |
| const struct gyro_config * | config |
| sensor_align_e ins_gyro::align |
| uint16_t ins_gyro::calibratingG |
| const struct gyro_config* ins_gyro::config |
| int32_t ins_gyro::g[3] |
| int32_t ins_gyro::gyroADC[XYZ_AXIS_COUNT] |
| biquad_t ins_gyro::gyroFilterState[3] |
| int32_t ins_gyro::gyroZero[XYZ_AXIS_COUNT] |
| bool ins_gyro::use_filter |
| stdev_t ins_gyro::var[3] |
 1.8.7
1.8.7 
