|
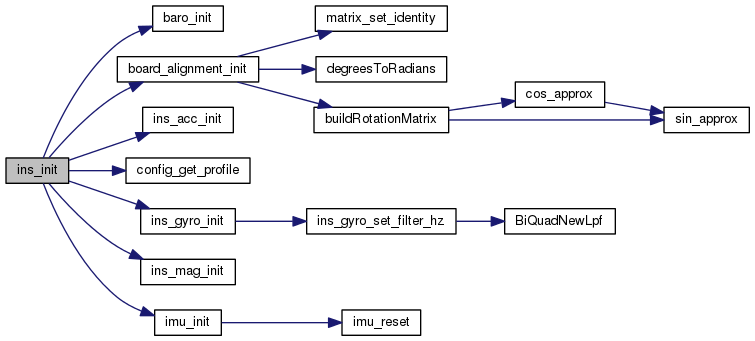
| void | ins_init (struct instruments *self, const struct config *config) |
| | Initializes all instruments using specified configuration. More...
|
| |
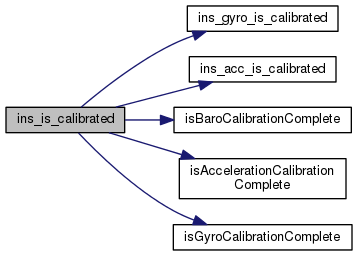
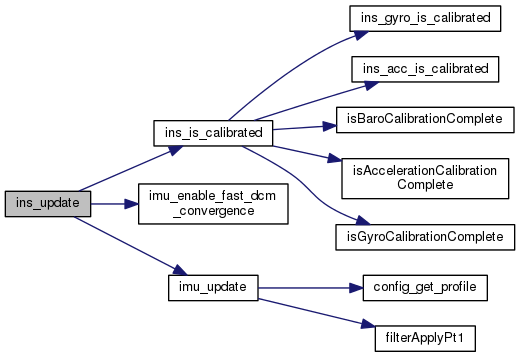
| bool | ins_is_calibrated (struct instruments *self) |
| |
| void | ins_start_acc_calibration (struct instruments *self) |
| |
| void | ins_start_gyro_calibration (struct instruments *self) |
| |
| void | ins_start_mag_calibration (struct instruments *self) |
| |
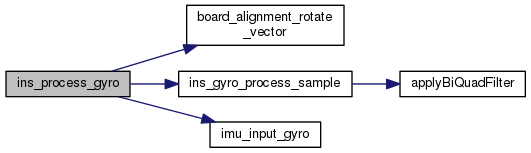
| void | ins_process_gyro (struct instruments *self, int32_t x, int32_t y, int32_t z) |
| |
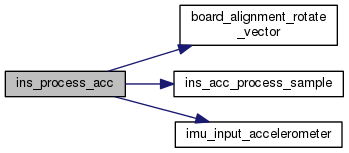
| void | ins_process_acc (struct instruments *self, int32_t x, int32_t y, int32_t z) |
| |
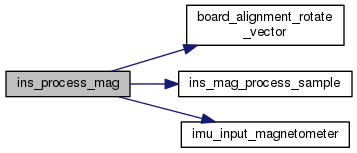
| void | ins_process_mag (struct instruments *self, int32_t x, int32_t y, int32_t z) |
| |
| void | ins_update (struct instruments *self, float dt) |
| |
| uint32_t | ins_get_altitude_cm (struct instruments *self) |
| | returns estimated altitude above sea level in cm More...
|
| |
| int16_t | ins_get_vertical_speed_cms (struct instruments *self) |
| | returns vertical speed in cm/s More...
|
| |
The purpose of this module is to maintain a filtered state of all flight instruments that are available to the pilot. Instrumentation shall report data in SI units or multiples of such (for example decidegrees for represetnting fractions of degrees when not using floating point).
Instruments object accepts raw sensor data as input and maintains estimated state that can be directly used by other parts of the flight controller. This module also handles sensor alignment.
Currently supported input sensors include:
- Accelerometer
- Gyroscope
- Magnetometer
Estimated quantities include:
- Orientation (quaternion and euler angles)
- Altitude
- Position
- Velocity
| Enumerator |
|---|
| INS_USE_SENSOR_GYRO |
|
| INS_USE_SENSOR_ACC |
|
| INS_USE_SENSOR_MAG |
|
| uint32_t ins_get_altitude_cm |
( |
struct instruments * |
self | ) |
|
returns estimated altitude above sea level in cm
| int16_t ins_get_vertical_speed_cms |
( |
struct instruments * |
self | ) |
|
returns vertical speed in cm/s
Initializes all instruments using specified configuration.
| void ins_process_acc |
( |
struct instruments * |
self, |
|
|
int32_t |
x, |
|
|
int32_t |
y, |
|
|
int32_t |
z |
|
) |
| |
| void ins_process_gyro |
( |
struct instruments * |
self, |
|
|
int32_t |
x, |
|
|
int32_t |
y, |
|
|
int32_t |
z |
|
) |
| |
| void ins_process_mag |
( |
struct instruments * |
self, |
|
|
int32_t |
x, |
|
|
int32_t |
y, |
|
|
int32_t |
z |
|
) |
| |
| void ins_start_acc_calibration |
( |
struct instruments * |
self | ) |
|
| void ins_start_gyro_calibration |
( |
struct instruments * |
self | ) |
|
| void ins_start_mag_calibration |
( |
struct instruments * |
self | ) |
|
| void ins_update |
( |
struct instruments * |
self, |
|
|
float |
dt |
|
) |
| |




 1.8.7
1.8.7 
