|
NinjaFlight
|
|
NinjaFlight
|
#include "system_calls.h"#include "../config/mixer.h"#include "../config/rc_controls.h"#include "../config/rx.h"#include "../common/filter.h"#include "../common/maths.h"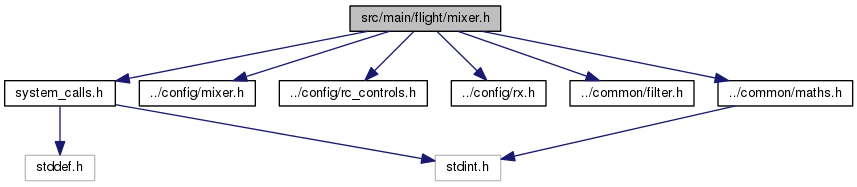

Go to the source code of this file.
Data Structures | |
| struct | mixer |
Macros | |
| #define | YAW_JUMP_PREVENTION_LIMIT_LOW 80 |
| #define | YAW_JUMP_PREVENTION_LIMIT_HIGH 500 |
Functions | |
| void | mixer_init (struct mixer *self, const struct config *config, const struct system_calls_pwm *pwm) |
| initializes a mixer struct More... | |
| void | mixer_input_command (struct mixer *self, mixer_input_t i, int16_t value) |
| inputs a command to one of the input channels of the mixer More... | |
| void | mixer_update (struct mixer *self) |
| calculates outputs from all mixer inputs and mixing rules More... | |
| void | mixer_enable_armed (struct mixer *self, bool on) |
| puts mixer into armed state so that outputs are calculated (TODO: this should probably be placed outside of the mixer!) More... | |
| bool | mixer_motor_limit_reached (struct mixer *self) |
| tests if any of the motors have reached their limit (usually maxthrottle) More... | |
| void | mixer_set_throttle_range (struct mixer *self, int16_t mid, int16_t min, int16_t max) |
| sets throttle range of the mixer (can be used to set 3d throttle range too) More... | |
| uint8_t | mixer_get_motor_count (struct mixer *self) |
| returns total number of motors that are being actively mixed by the mixer as part of current profile More... | |
| uint8_t | mixer_get_servo_count (struct mixer *self) |
| returns total number of servos that are being actively mxier by the mixer as part of current profile More... | |
| void | mixer_clear_rules (struct mixer *self) |
| saves motor mixer into cleanflight motor mixer format More... | |
| #define YAW_JUMP_PREVENTION_LIMIT_HIGH 500 |
| #define YAW_JUMP_PREVENTION_LIMIT_LOW 80 |
| void mixer_init | ( | struct mixer * | self, |
| const struct config * | config, | ||
| const struct system_calls_pwm * | pwm | ||
| ) |
initializes a mixer struct
 1.8.7
1.8.7 
