|
NinjaFlight
|
|
NinjaFlight
|
#include <stdbool.h>#include <stdint.h>#include <stdlib.h>#include <math.h>#include <platform.h>#include "debug.h"#include "common/axis.h"#include "common/maths.h"#include "system.h"#include "nvic.h"#include "gpio.h"#include "bus_i2c.h"#include "light_led.h"#include "sensor.h"#include "compass.h"#include "compass_hmc5883l.h"
Macros | |
| #define | MAG_ADDRESS 0x1E |
| #define | MAG_DATA_REGISTER 0x03 |
| #define | HMC58X3_R_CONFA 0 |
| #define | HMC58X3_R_CONFB 1 |
| #define | HMC58X3_R_MODE 2 |
| #define | HMC58X3_X_SELF_TEST_GAUSS (+1.16f) |
| #define | HMC58X3_Y_SELF_TEST_GAUSS (+1.16f) |
| #define | HMC58X3_Z_SELF_TEST_GAUSS (+1.08f) |
| #define | SELF_TEST_LOW_LIMIT (243.0f / 390.0f) |
| #define | SELF_TEST_HIGH_LIMIT (575.0f / 390.0f) |
| #define | HMC_POS_BIAS 1 |
| #define | HMC_NEG_BIAS 2 |
Functions | |
| void | MAG_DATA_READY_EXTI_Handler (void) |
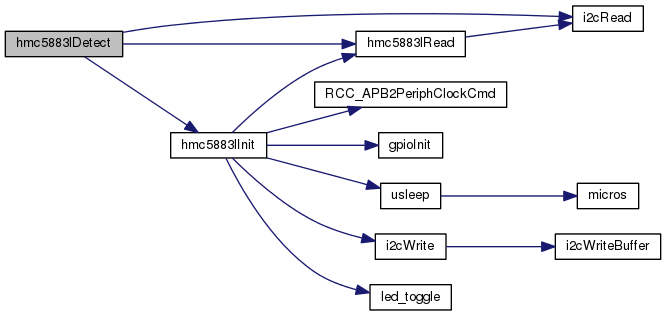
| bool | hmc5883lDetect (mag_t *mag, const hmc5883Config_t *hmc5883ConfigToUse) |
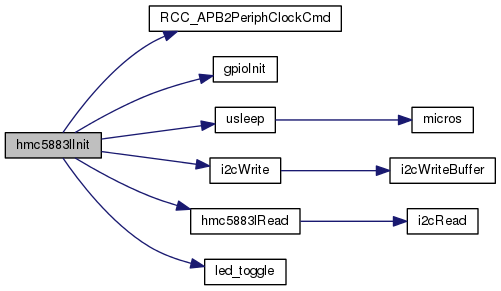
| void | hmc5883lInit (void) |
| bool | hmc5883lRead (int16_t *magData) |
| #define HMC58X3_R_CONFA 0 |
| #define HMC58X3_R_CONFB 1 |
| #define HMC58X3_R_MODE 2 |
| #define HMC58X3_X_SELF_TEST_GAUSS (+1.16f) |
| #define HMC58X3_Y_SELF_TEST_GAUSS (+1.16f) |
| #define HMC58X3_Z_SELF_TEST_GAUSS (+1.08f) |
| #define HMC_NEG_BIAS 2 |
| #define HMC_POS_BIAS 1 |
| #define MAG_ADDRESS 0x1E |
| #define MAG_DATA_REGISTER 0x03 |
| #define SELF_TEST_HIGH_LIMIT (575.0f / 390.0f) |
| #define SELF_TEST_LOW_LIMIT (243.0f / 390.0f) |
| bool hmc5883lDetect | ( | mag_t * | mag, |
| const hmc5883Config_t * | hmc5883ConfigToUse | ||
| ) |
| void hmc5883lInit | ( | void | ) |
| bool hmc5883lRead | ( | int16_t * | magData | ) |

| void MAG_DATA_READY_EXTI_Handler | ( | void | ) |

 1.8.7
1.8.7 
