|
NinjaFlight
|
|
NinjaFlight
|
#include <stdbool.h>#include <stdint.h>#include <math.h>#include "build_config.h"#include <platform.h>#include "common/axis.h"#include "common/maths.h"#include "system.h"#include "gpio.h"#include "bus_i2c.h"#include "sensor.h"#include "compass.h"#include "compass_ak8975.h"
Macros | |
| #define | AK8975_MAG_I2C_ADDRESS 0x0C |
| #define | AK8975_MAG_REG_WHO_AM_I 0x00 |
| #define | AK8975_MAG_REG_INFO 0x01 |
| #define | AK8975_MAG_REG_STATUS1 0x02 |
| #define | AK8975_MAG_REG_HXL 0x03 |
| #define | AK8975_MAG_REG_HXH 0x04 |
| #define | AK8975_MAG_REG_HYL 0x05 |
| #define | AK8975_MAG_REG_HYH 0x06 |
| #define | AK8975_MAG_REG_HZL 0x07 |
| #define | AK8975_MAG_REG_HZH 0x08 |
| #define | AK8975_MAG_REG_STATUS2 0x09 |
| #define | AK8975_MAG_REG_CNTL 0x0a |
| #define | AK8975_MAG_REG_ASCT 0x0c |
| #define | AK8975A_ASAX 0x10 |
| #define | AK8975A_ASAY 0x11 |
| #define | AK8975A_ASAZ 0x12 |
| #define | BIT_STATUS1_REG_DATA_READY (1 << 0) |
| #define | BIT_STATUS2_REG_DATA_ERROR (1 << 2) |
| #define | BIT_STATUS2_REG_MAG_SENSOR_OVERFLOW (1 << 3) |
Functions | |
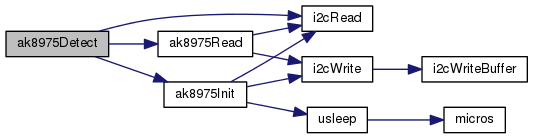
| bool | ak8975Detect (mag_t *mag) |
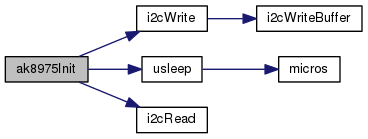
| void | ak8975Init (void) |
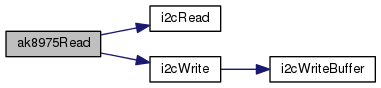
| bool | ak8975Read (int16_t *magData) |
| #define AK8975_MAG_I2C_ADDRESS 0x0C |
| #define AK8975_MAG_REG_ASCT 0x0c |
| #define AK8975_MAG_REG_CNTL 0x0a |
| #define AK8975_MAG_REG_HXH 0x04 |
| #define AK8975_MAG_REG_HXL 0x03 |
| #define AK8975_MAG_REG_HYH 0x06 |
| #define AK8975_MAG_REG_HYL 0x05 |
| #define AK8975_MAG_REG_HZH 0x08 |
| #define AK8975_MAG_REG_HZL 0x07 |
| #define AK8975_MAG_REG_INFO 0x01 |
| #define AK8975_MAG_REG_STATUS1 0x02 |
| #define AK8975_MAG_REG_STATUS2 0x09 |
| #define AK8975_MAG_REG_WHO_AM_I 0x00 |
| #define AK8975A_ASAX 0x10 |
| #define AK8975A_ASAY 0x11 |
| #define AK8975A_ASAZ 0x12 |
| #define BIT_STATUS1_REG_DATA_READY (1 << 0) |
| #define BIT_STATUS2_REG_DATA_ERROR (1 << 2) |
| #define BIT_STATUS2_REG_MAG_SENSOR_OVERFLOW (1 << 3) |
| bool ak8975Detect | ( | mag_t * | mag | ) |
| void ak8975Init | ( | void | ) |
| bool ak8975Read | ( | int16_t * | magData | ) |
 1.8.7
1.8.7 
