|
NinjaFlight
|
|
NinjaFlight
|
#include <stdbool.h>#include <stdint.h>#include <stdlib.h>#include <string.h>#include <platform.h>#include "build_config.h"#include "debug.h"#include "common/maths.h"#include "nvic.h"#include "system.h"#include "gpio.h"#include "exti.h"#include "bus_i2c.h"#include "gyro_sync.h"#include "sensor.h"#include "accgyro.h"#include "accgyro_mpu3050.h"#include "accgyro_mpu6050.h"#include "accgyro_mpu6500.h"#include "accgyro_spi_mpu6000.h"#include "accgyro_spi_mpu6500.h"#include "accgyro_mpu.h"
Macros | |
| #define | MPU_ADDRESS 0x68 |
Functions | |
| mpuDetectionResult_t * | detectMpu (const extiConfig_t *configToUse) |
| void | MPU_DATA_READY_EXTI_Handler (void) |
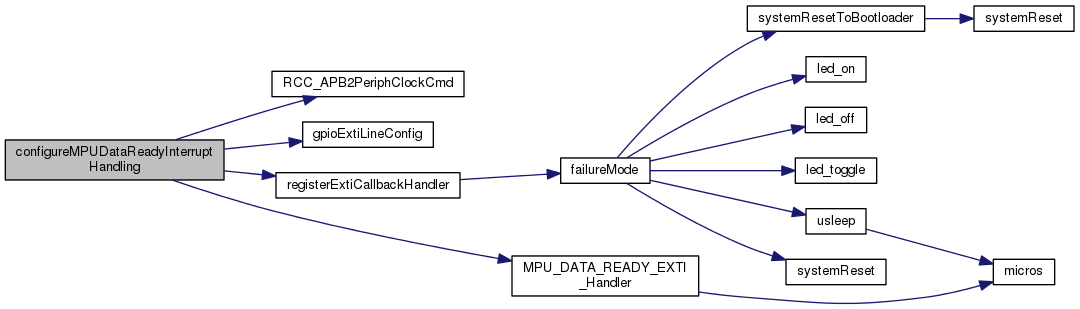
| void | configureMPUDataReadyInterruptHandling (void) |
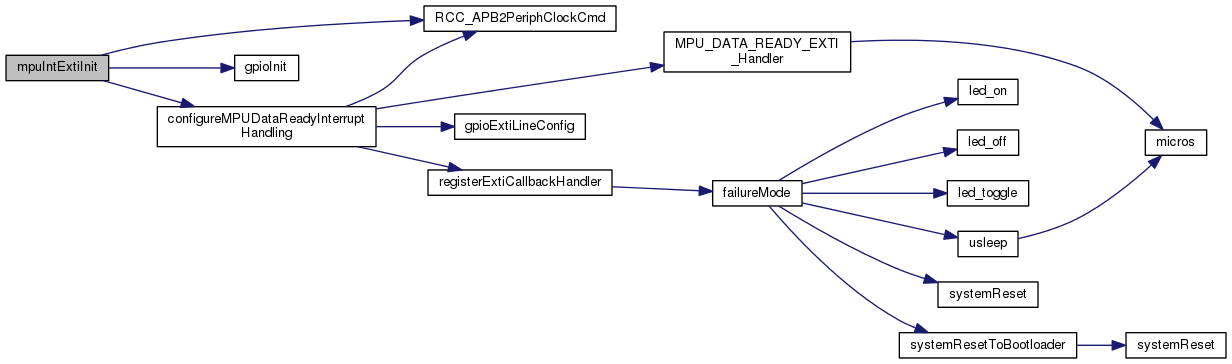
| void | mpuIntExtiInit (void) |
| bool | mpuAccRead (int16_t *accData) |
| bool | mpuGyroRead (int16_t *gyroADC) |
| bool | mpuIsDataReady (void) |
Variables | |
| mpuDetectionResult_t | mpuDetectionResult |
| mpuConfiguration_t | mpuConfiguration |
| #define MPU_ADDRESS 0x68 |
| void configureMPUDataReadyInterruptHandling | ( | void | ) |
| mpuDetectionResult_t* detectMpu | ( | const extiConfig_t * | configToUse | ) |

| void MPU_DATA_READY_EXTI_Handler | ( | void | ) |

| bool mpuAccRead | ( | int16_t * | accData | ) |
| bool mpuGyroRead | ( | int16_t * | gyroADC | ) |
| void mpuIntExtiInit | ( | void | ) |
| bool mpuIsDataReady | ( | void | ) |
| mpuConfiguration_t mpuConfiguration |
| mpuDetectionResult_t mpuDetectionResult |
 1.8.7
1.8.7 
