Go to the source code of this file.
|
| enum | lpf_e {
INV_FILTER_256HZ_NOLPF2 = 0,
INV_FILTER_188HZ,
INV_FILTER_98HZ,
INV_FILTER_42HZ,
INV_FILTER_20HZ,
INV_FILTER_10HZ,
INV_FILTER_5HZ,
INV_FILTER_2100HZ_NOLPF,
NUM_FILTER
} |
| |
| enum | gyro_fsr_e {
INV_FSR_250DPS = 0,
INV_FSR_500DPS,
INV_FSR_1000DPS,
INV_FSR_2000DPS,
NUM_GYRO_FSR
} |
| |
| enum | clock_sel_e { INV_CLK_INTERNAL = 0,
INV_CLK_PLL,
NUM_CLK
} |
| |
| enum | accel_fsr_e {
INV_FSR_2G = 0,
INV_FSR_4G,
INV_FSR_8G,
INV_FSR_16G,
NUM_ACCEL_FSR
} |
| |
| enum | detectedMPUSensor_e {
MPU_NONE,
MPU_3050,
MPU_60x0,
MPU_60x0_SPI,
MPU_65xx_I2C,
MPU_65xx_SPI
} |
| |
| enum | mpu6050Resolution_e { MPU_HALF_RESOLUTION,
MPU_FULL_RESOLUTION
} |
| |
| #define MPU6500_WHO_AM_I_CONST (0x70) |
| #define MPU_INQUIRY_MASK 0x7E |
| #define MPU_RA_ACCEL_CONFIG 0x1C |
| #define MPU_RA_ACCEL_XOUT_H 0x3B |
| #define MPU_RA_ACCEL_XOUT_L 0x3C |
| #define MPU_RA_ACCEL_YOUT_H 0x3D |
| #define MPU_RA_ACCEL_YOUT_L 0x3E |
| #define MPU_RA_ACCEL_ZOUT_H 0x3F |
| #define MPU_RA_ACCEL_ZOUT_L 0x40 |
| #define MPU_RA_BANK_SEL 0x6D |
| #define MPU_RA_CONFIG 0x1A |
| #define MPU_RA_DMP_CFG_1 0x70 |
| #define MPU_RA_DMP_CFG_2 0x71 |
| #define MPU_RA_DMP_INT_STATUS 0x39 |
| #define MPU_RA_EXT_SENS_DATA_00 0x49 |
| #define MPU_RA_FF_DUR 0x1E |
| #define MPU_RA_FF_THR 0x1D |
| #define MPU_RA_FIFO_COUNTH 0x72 |
| #define MPU_RA_FIFO_COUNTL 0x73 |
| #define MPU_RA_FIFO_EN 0x23 |
| #define MPU_RA_FIFO_R_W 0x74 |
| #define MPU_RA_GYRO_CONFIG 0x1B |
| #define MPU_RA_GYRO_XOUT_H 0x43 |
| #define MPU_RA_GYRO_XOUT_L 0x44 |
| #define MPU_RA_GYRO_YOUT_H 0x45 |
| #define MPU_RA_GYRO_YOUT_L 0x46 |
| #define MPU_RA_GYRO_ZOUT_H 0x47 |
| #define MPU_RA_GYRO_ZOUT_L 0x48 |
| #define MPU_RA_I2C_MST_CTRL 0x24 |
| #define MPU_RA_I2C_MST_DELAY_CTRL 0x67 |
| #define MPU_RA_I2C_MST_STATUS 0x36 |
| #define MPU_RA_I2C_SLV0_ADDR 0x25 |
| #define MPU_RA_I2C_SLV0_CTRL 0x27 |
| #define MPU_RA_I2C_SLV0_DO 0x63 |
| #define MPU_RA_I2C_SLV0_REG 0x26 |
| #define MPU_RA_I2C_SLV1_ADDR 0x28 |
| #define MPU_RA_I2C_SLV1_CTRL 0x2A |
| #define MPU_RA_I2C_SLV1_DO 0x64 |
| #define MPU_RA_I2C_SLV1_REG 0x29 |
| #define MPU_RA_I2C_SLV2_ADDR 0x2B |
| #define MPU_RA_I2C_SLV2_CTRL 0x2D |
| #define MPU_RA_I2C_SLV2_DO 0x65 |
| #define MPU_RA_I2C_SLV2_REG 0x2C |
| #define MPU_RA_I2C_SLV3_ADDR 0x2E |
| #define MPU_RA_I2C_SLV3_CTRL 0x30 |
| #define MPU_RA_I2C_SLV3_DO 0x66 |
| #define MPU_RA_I2C_SLV3_REG 0x2F |
| #define MPU_RA_I2C_SLV4_ADDR 0x31 |
| #define MPU_RA_I2C_SLV4_CTRL 0x34 |
| #define MPU_RA_I2C_SLV4_DI 0x35 |
| #define MPU_RA_I2C_SLV4_DO 0x33 |
| #define MPU_RA_I2C_SLV4_REG 0x32 |
| #define MPU_RA_INT_ENABLE 0x38 |
| #define MPU_RA_INT_PIN_CFG 0x37 |
| #define MPU_RA_INT_STATUS 0x3A |
| #define MPU_RA_MEM_R_W 0x6F |
| #define MPU_RA_MEM_START_ADDR 0x6E |
| #define MPU_RA_MOT_DETECT_CTRL 0x69 |
| #define MPU_RA_MOT_DETECT_STATUS 0x61 |
| #define MPU_RA_MOT_DUR 0x20 |
| #define MPU_RA_MOT_THR 0x1F |
| #define MPU_RA_PRODUCT_ID 0x0C |
| #define MPU_RA_PWR_MGMT_1 0x6B |
| #define MPU_RA_PWR_MGMT_2 0x6C |
| #define MPU_RA_SIGNAL_PATH_RESET 0x68 |
| #define MPU_RA_SMPLRT_DIV 0x19 |
| #define MPU_RA_TEMP_OUT_H 0x41 |
| #define MPU_RA_TEMP_OUT_L 0x42 |
| #define MPU_RA_USER_CTRL 0x6A |
| #define MPU_RA_WHO_AM_I 0x75 |
| #define MPU_RA_WHO_AM_I 0x75 |
| #define MPU_RA_WHO_AM_I_LEGACY 0x00 |
| #define MPU_RA_X_FINE_GAIN 0x03 |
| #define MPU_RA_XA_OFFS_H 0x06 |
| #define MPU_RA_XA_OFFS_L_TC 0x07 |
| #define MPU_RA_XG_OFFS_TC 0x00 |
| #define MPU_RA_XG_OFFS_USRH 0x13 |
| #define MPU_RA_XG_OFFS_USRL 0x14 |
| #define MPU_RA_Y_FINE_GAIN 0x04 |
| #define MPU_RA_YA_OFFS_H 0x08 |
| #define MPU_RA_YA_OFFS_L_TC 0x09 |
| #define MPU_RA_YG_OFFS_TC 0x01 |
| #define MPU_RA_YG_OFFS_USRH 0x15 |
| #define MPU_RA_YG_OFFS_USRL 0x16 |
| #define MPU_RA_Z_FINE_GAIN 0x05 |
| #define MPU_RA_ZA_OFFS_H 0x0A |
| #define MPU_RA_ZA_OFFS_L_TC 0x0B |
| #define MPU_RA_ZG_OFFS_TC 0x02 |
| #define MPU_RA_ZG_OFFS_USRH 0x17 |
| #define MPU_RA_ZG_OFFS_USRL 0x18 |
| #define MPU_RA_ZRMOT_DUR 0x22 |
| #define MPU_RA_ZRMOT_THR 0x21 |
| #define MPU_RF_DATA_RDY_EN (1 << 0) |
| #define MPUx0x0_WHO_AM_I_CONST (0x68) |
| typedef bool(* mpuReadRegisterFunc)(uint8_t reg, uint8_t length, uint8_t *data) |
| typedef bool(* mpuWriteRegisterFunc)(uint8_t reg, uint8_t data) |
| Enumerator |
|---|
| INV_FSR_2G |
|
| INV_FSR_4G |
|
| INV_FSR_8G |
|
| INV_FSR_16G |
|
| NUM_ACCEL_FSR |
|
| Enumerator |
|---|
| INV_CLK_INTERNAL |
|
| INV_CLK_PLL |
|
| NUM_CLK |
|
| Enumerator |
|---|
| MPU_NONE |
|
| MPU_3050 |
|
| MPU_60x0 |
|
| MPU_60x0_SPI |
|
| MPU_65xx_I2C |
|
| MPU_65xx_SPI |
|
| Enumerator |
|---|
| INV_FSR_250DPS |
|
| INV_FSR_500DPS |
|
| INV_FSR_1000DPS |
|
| INV_FSR_2000DPS |
|
| NUM_GYRO_FSR |
|
| Enumerator |
|---|
| INV_FILTER_256HZ_NOLPF2 |
|
| INV_FILTER_188HZ |
|
| INV_FILTER_98HZ |
|
| INV_FILTER_42HZ |
|
| INV_FILTER_20HZ |
|
| INV_FILTER_10HZ |
|
| INV_FILTER_5HZ |
|
| INV_FILTER_2100HZ_NOLPF |
|
| NUM_FILTER |
|
| Enumerator |
|---|
| MPU_HALF_RESOLUTION |
|
| MPU_FULL_RESOLUTION |
|
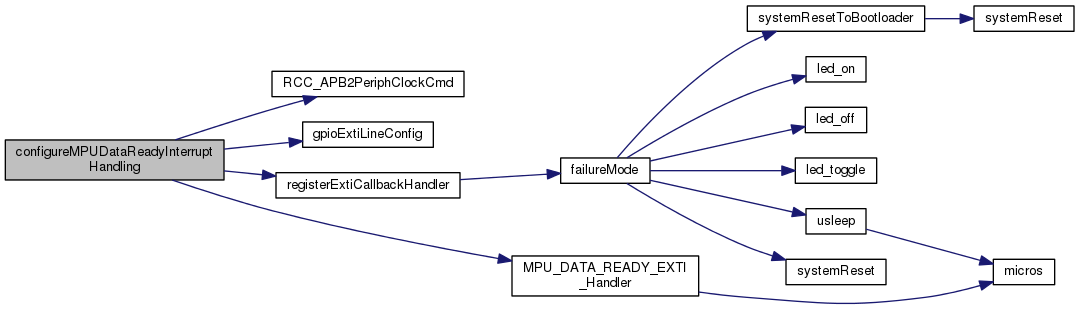
| void configureMPUDataReadyInterruptHandling |
( |
void |
| ) |
|
| bool mpuAccRead |
( |
int16_t * |
accData | ) |
|
| bool mpuGyroRead |
( |
int16_t * |
gyroADC | ) |
|
| void mpuIntExtiInit |
( |
void |
| ) |
|
| bool mpuIsDataReady |
( |
void |
| ) |
|



 1.8.7
1.8.7 
