|
NinjaFlight
|
|
NinjaFlight
|
#include <stdbool.h>#include <stdint.h>#include <stdlib.h>#include <platform.h>#include "build_config.h"#include "common/axis.h"#include "common/maths.h"#include "system.h"#include "exti.h"#include "gpio.h"#include "gyro_sync.h"#include "sensor.h"#include "accgyro.h"#include "accgyro_mpu.h"#include "accgyro_mpu6500.h"
Functions | |
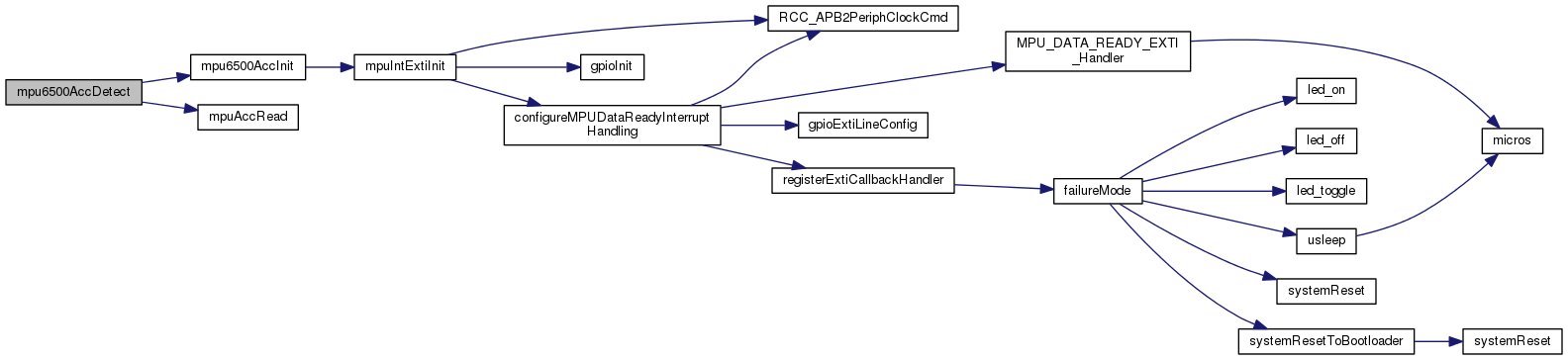
| bool | mpu6500AccDetect (acc_t *accel) |
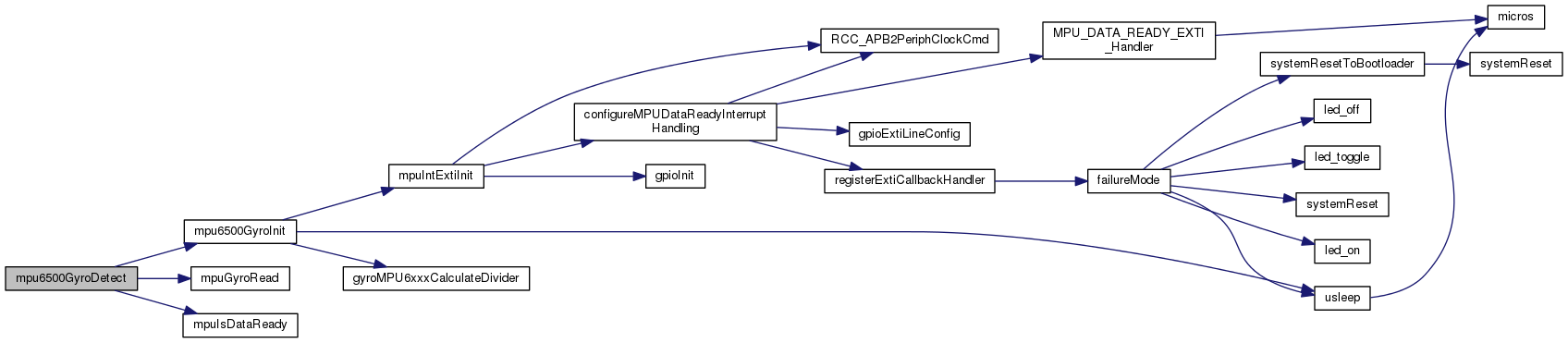
| bool | mpu6500GyroDetect (gyro_t *gyr) |
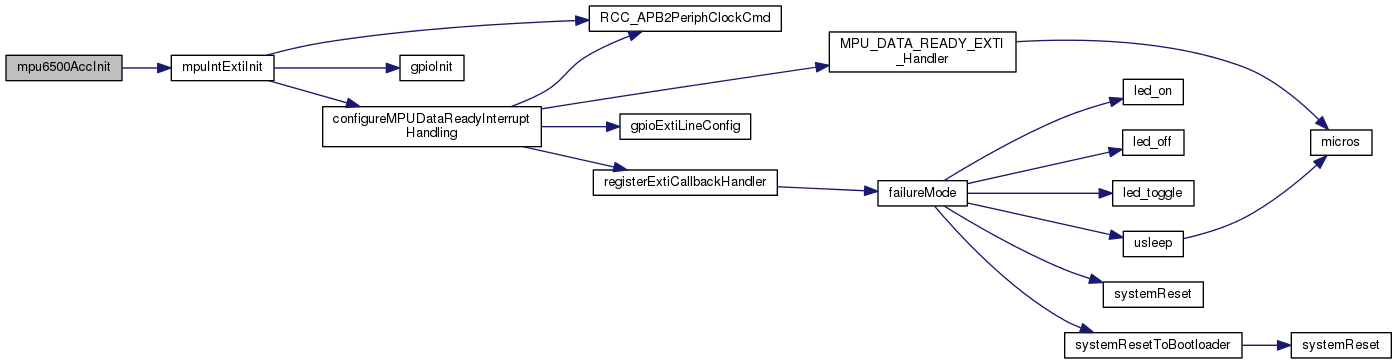
| void | mpu6500AccInit (acc_t *accel) |
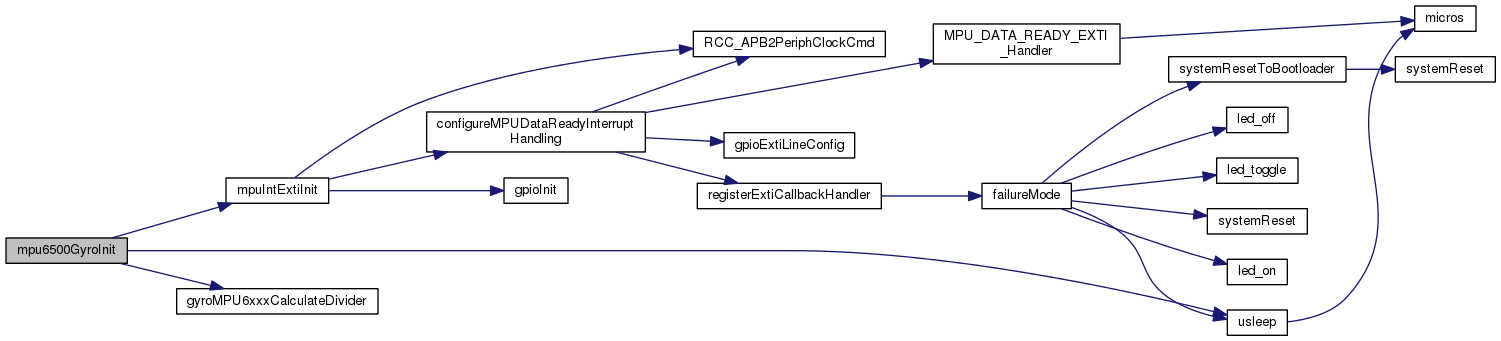
| void | mpu6500GyroInit (uint8_t lpf) |
| bool mpu6500AccDetect | ( | acc_t * | accel | ) |
| void mpu6500AccInit | ( | acc_t * | accel | ) |
| bool mpu6500GyroDetect | ( | gyro_t * | gyr | ) |
| void mpu6500GyroInit | ( | uint8_t | lpf | ) |
 1.8.7
1.8.7 
