|
NinjaFlight
|
|
NinjaFlight
|
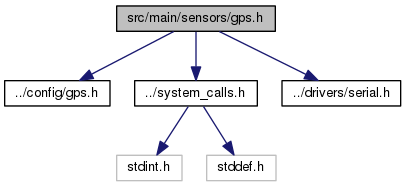

Go to the source code of this file.
Data Structures | |
| struct | gpsCoordinateDDDMMmmmm_s |
| struct | gpsData_s |
| struct | gps |
Macros | |
| #define | LAT 0 |
| #define | LON 1 |
| #define | GPS_DEGREES_DIVIDER 10000000L |
| #define | SBAS_MODE_MAX SBAS_GAGAN |
| #define | GPS_BAUDRATE_MAX GPS_BAUDRATE_9600 |
| #define | GPS_MESSAGE_STATE_ENTRY_COUNT (GPS_MESSAGE_STATE_MAX + 1) |
| #define | GPS_PACKET_LOG_ENTRY_COUNT 21 |
| #define | GPS_DBHZ_MIN 0 |
| #define | GPS_DBHZ_MAX 55 |
Typedefs | |
| typedef struct gpsCoordinateDDDMMmmmm_s | gpsCoordinateDDDMMmmmm_t |
| typedef struct gpsData_s | gpsData_t |
Enumerations | |
| enum | gpsBaudRate_e { GPS_BAUDRATE_115200 = 0, GPS_BAUDRATE_57600, GPS_BAUDRATE_38400, GPS_BAUDRATE_19200, GPS_BAUDRATE_9600 } |
| enum | gpsMessageState_e { GPS_MESSAGE_STATE_IDLE = 0, GPS_MESSAGE_STATE_INIT, GPS_MESSAGE_STATE_SBAS, GPS_MESSAGE_STATE_MAX = GPS_MESSAGE_STATE_SBAS } |
Functions | |
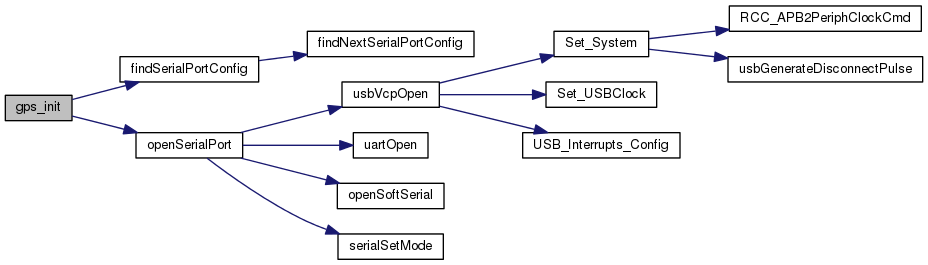
| int | gps_init (struct gps *self, const struct system_calls *system, const struct config *config) |
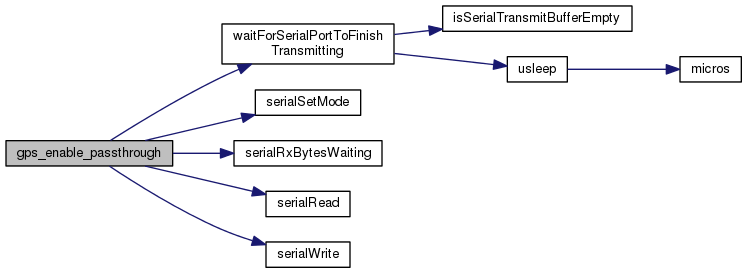
| void | gps_enable_passthrough (struct gps *self, struct serialPort_s *gpsPassthroughPort) |
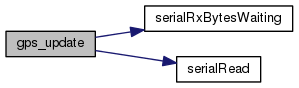
| void | gps_update (struct gps *self) |
| bool | gps_process_char (struct gps *self, uint8_t c) |
| #define GPS_BAUDRATE_MAX GPS_BAUDRATE_9600 |
| #define GPS_DBHZ_MAX 55 |
| #define GPS_DBHZ_MIN 0 |
| #define GPS_DEGREES_DIVIDER 10000000L |
| #define GPS_MESSAGE_STATE_ENTRY_COUNT (GPS_MESSAGE_STATE_MAX + 1) |
| #define GPS_PACKET_LOG_ENTRY_COUNT 21 |
| #define LAT 0 |
| #define LON 1 |
| #define SBAS_MODE_MAX SBAS_GAGAN |
| typedef struct gpsCoordinateDDDMMmmmm_s gpsCoordinateDDDMMmmmm_t |
| enum gpsBaudRate_e |
| enum gpsMessageState_e |
| void gps_enable_passthrough | ( | struct gps * | self, |
| struct serialPort_s * | gpsPassthroughPort | ||
| ) |
| int gps_init | ( | struct gps * | self, |
| const struct system_calls * | system, | ||
| const struct config * | config | ||
| ) |
| bool gps_process_char | ( | struct gps * | self, |
| uint8_t | c | ||
| ) |
| void gps_update | ( | struct gps * | self | ) |
 1.8.7
1.8.7 
