|
NinjaFlight
|
|
NinjaFlight
|
#include <stdbool.h>#include <stdint.h>#include <string.h>#include <stdlib.h>#include <platform.h>#include "gpio.h"#include "timer.h"#include "drivers/bus_i2c.h"#include "pwm_output.h"#include "pwm_rx.h"#include "pwm_mapping.h"#include "serial_uart.h"
Enumerations | |
| enum | { MAP_TO_PPM_INPUT = 1, MAP_TO_PWM_INPUT, MAP_TO_MOTOR_OUTPUT, MAP_TO_SERVO_OUTPUT } |
Functions | |
| void | pwmBrushedMotorConfig (const timerHardware_t *timerHardware, uint8_t motorIndex, uint16_t motorPwmRate, uint16_t idlePulse) |
| void | pwmBrushlessMotorConfig (const timerHardware_t *timerHardware, uint8_t motorIndex, uint16_t motorPwmRate, uint16_t idlePulse) |
| void | pwmOneshotMotorConfig (const timerHardware_t *timerHardware, uint8_t motorIndex) |
| void | pwmServoConfig (const timerHardware_t *timerHardware, uint8_t servoIndex, uint16_t servoPwmRate, uint16_t servoCenterPulse) |
| pwmIOConfiguration_t * | pwmGetOutputConfiguration (void) |
| void | ppmAvoidPWMTimerClash (const timerHardware_t *timerHardwarePtr, TIM_TypeDef *sharedPwmTimer) |
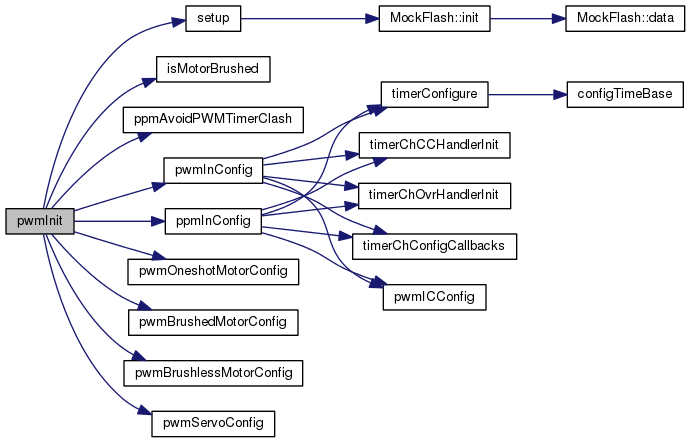
| pwmIOConfiguration_t * | pwmInit (drv_pwm_config_t *init, const struct pwm_input_config *config) |
Variables | |
| bool | pwmUseInputFiltering = false |
| void ppmAvoidPWMTimerClash | ( | const timerHardware_t * | timerHardwarePtr, |
| TIM_TypeDef * | sharedPwmTimer | ||
| ) |
| void pwmBrushedMotorConfig | ( | const timerHardware_t * | timerHardware, |
| uint8_t | motorIndex, | ||
| uint16_t | motorPwmRate, | ||
| uint16_t | idlePulse | ||
| ) |
| void pwmBrushlessMotorConfig | ( | const timerHardware_t * | timerHardware, |
| uint8_t | motorIndex, | ||
| uint16_t | motorPwmRate, | ||
| uint16_t | idlePulse | ||
| ) |
| pwmIOConfiguration_t* pwmGetOutputConfiguration | ( | void | ) |
| pwmIOConfiguration_t* pwmInit | ( | drv_pwm_config_t * | init, |
| const struct pwm_input_config * | config | ||
| ) |
| void pwmOneshotMotorConfig | ( | const timerHardware_t * | timerHardware, |
| uint8_t | motorIndex | ||
| ) |
| void pwmServoConfig | ( | const timerHardware_t * | timerHardware, |
| uint8_t | servoIndex, | ||
| uint16_t | servoPwmRate, | ||
| uint16_t | servoCenterPulse | ||
| ) |
| bool pwmUseInputFiltering = false |
 1.8.7
1.8.7 
