|
NinjaFlight
|
|
NinjaFlight
|
#include <stdint.h>#include <stdbool.h>#include <math.h>#include <limits.h>#include "debug.h"#include <platform.h>#include "build_config.h"#include "common/axis.h"#include "common/maths.h"#include "common/filter.h"#include "config/config.h"#include "drivers/sensor.h"#include "drivers/accgyro.h"#include "drivers/pwm_mapping.h"#include "drivers/gyro_sync.h"#include "sensors/acceleration.h"#include "rx/rx.h"#include "flight/anglerate.h"#include "flight/mixer.h"#include "flight/tilt.h"#include "unittest_macros.h"#include "gtest/gtest.h"
Functions | |
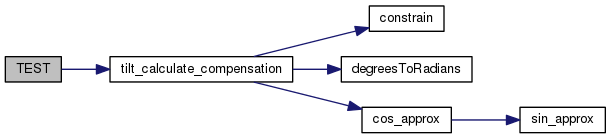
| TEST (TiltComensator, CompensationTest) | |
Variables | |
| rxRuntimeConfig_t | rxRuntimeConfig |
| struct pid_controller_output | pid_output |
| TEST | ( | TiltComensator | , |
| CompensationTest | |||
| ) |
| struct pid_controller_output pid_output |
| rxRuntimeConfig_t rxRuntimeConfig |
 1.8.7
1.8.7 
