|
NinjaFlight
|
|
NinjaFlight
|
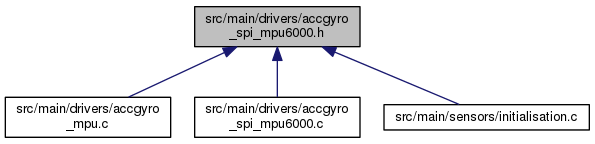
Go to the source code of this file.
Macros | |
| #define | MPU6000_CONFIG 0x1A |
| #define | BITS_DLPF_CFG_256HZ 0x00 |
| #define | BITS_DLPF_CFG_188HZ 0x01 |
| #define | BITS_DLPF_CFG_98HZ 0x02 |
| #define | BITS_DLPF_CFG_42HZ 0x03 |
| #define | GYRO_SCALE_FACTOR 0.00053292f |
| #define | MPU6000_WHO_AM_I_CONST (0x68) |
Functions | |
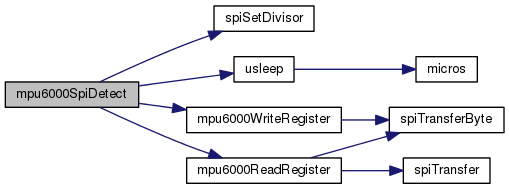
| bool | mpu6000SpiDetect (void) |
| bool | mpu6000SpiAccDetect (acc_t *acc) |
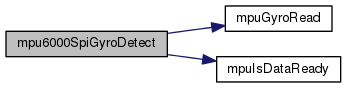
| bool | mpu6000SpiGyroDetect (gyro_t *gyro) |
| bool | mpu6000WriteRegister (uint8_t reg, uint8_t data) |
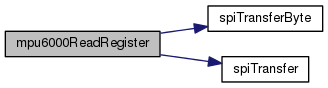
| bool | mpu6000ReadRegister (uint8_t reg, uint8_t length, uint8_t *data) |
| #define BITS_DLPF_CFG_188HZ 0x01 |
| #define BITS_DLPF_CFG_256HZ 0x00 |
| #define BITS_DLPF_CFG_42HZ 0x03 |
| #define BITS_DLPF_CFG_98HZ 0x02 |
| #define GYRO_SCALE_FACTOR 0.00053292f |
| #define MPU6000_CONFIG 0x1A |
| #define MPU6000_WHO_AM_I_CONST (0x68) |
| bool mpu6000ReadRegister | ( | uint8_t | reg, |
| uint8_t | length, | ||
| uint8_t * | data | ||
| ) |
| bool mpu6000SpiAccDetect | ( | acc_t * | acc | ) |

| bool mpu6000SpiDetect | ( | void | ) |
| bool mpu6000SpiGyroDetect | ( | gyro_t * | gyro | ) |
| bool mpu6000WriteRegister | ( | uint8_t | reg, |
| uint8_t | data | ||
| ) |

 1.8.7
1.8.7 
