|
NinjaFlight
|
|
NinjaFlight
|
#include <stdbool.h>#include <stdint.h>#include <platform.h>#include "system.h"#include "bus_i2c.h"#include "common/maths.h"#include "common/axis.h"#include "sensor.h"#include "accgyro.h"#include "accgyro_l3g4200d.h"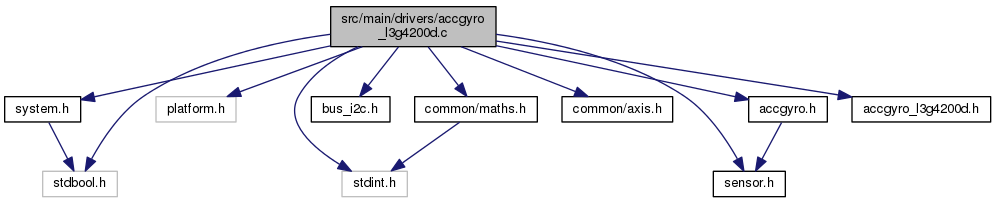
Macros | |
| #define | L3G4200D_ADDRESS 0x68 |
| #define | L3G4200D_ID 0xD3 |
| #define | L3G4200D_AUTOINCR 0x80 |
| #define | L3G4200D_WHO_AM_I 0x0F |
| #define | L3G4200D_CTRL_REG1 0x20 |
| #define | L3G4200D_CTRL_REG2 0x21 |
| #define | L3G4200D_CTRL_REG3 0x22 |
| #define | L3G4200D_CTRL_REG4 0x23 |
| #define | L3G4200D_CTRL_REG5 0x24 |
| #define | L3G4200D_REFERENCE 0x25 |
| #define | L3G4200D_STATUS_REG 0x27 |
| #define | L3G4200D_GYRO_OUT 0x28 |
| #define | L3G4200D_POWER_ON 0x0F |
| #define | L3G4200D_FS_SEL_2000DPS 0xF0 |
| #define | L3G4200D_DLPF_32HZ 0x00 |
| #define | L3G4200D_DLPF_54HZ 0x40 |
| #define | L3G4200D_DLPF_78HZ 0x80 |
| #define | L3G4200D_DLPF_93HZ 0xC0 |
Functions | |
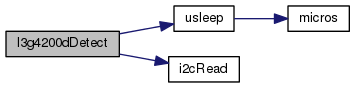
| bool | l3g4200dDetect (gyro_t *gyr) |
| #define L3G4200D_ADDRESS 0x68 |
| #define L3G4200D_AUTOINCR 0x80 |
| #define L3G4200D_CTRL_REG1 0x20 |
| #define L3G4200D_CTRL_REG2 0x21 |
| #define L3G4200D_CTRL_REG3 0x22 |
| #define L3G4200D_CTRL_REG4 0x23 |
| #define L3G4200D_CTRL_REG5 0x24 |
| #define L3G4200D_DLPF_32HZ 0x00 |
| #define L3G4200D_DLPF_54HZ 0x40 |
| #define L3G4200D_DLPF_78HZ 0x80 |
| #define L3G4200D_DLPF_93HZ 0xC0 |
| #define L3G4200D_FS_SEL_2000DPS 0xF0 |
| #define L3G4200D_GYRO_OUT 0x28 |
| #define L3G4200D_ID 0xD3 |
| #define L3G4200D_POWER_ON 0x0F |
| #define L3G4200D_REFERENCE 0x25 |
| #define L3G4200D_STATUS_REG 0x27 |
| #define L3G4200D_WHO_AM_I 0x0F |
| bool l3g4200dDetect | ( | gyro_t * | gyr | ) |
 1.8.7
1.8.7 
