|
NinjaFlight
|
|
NinjaFlight
|
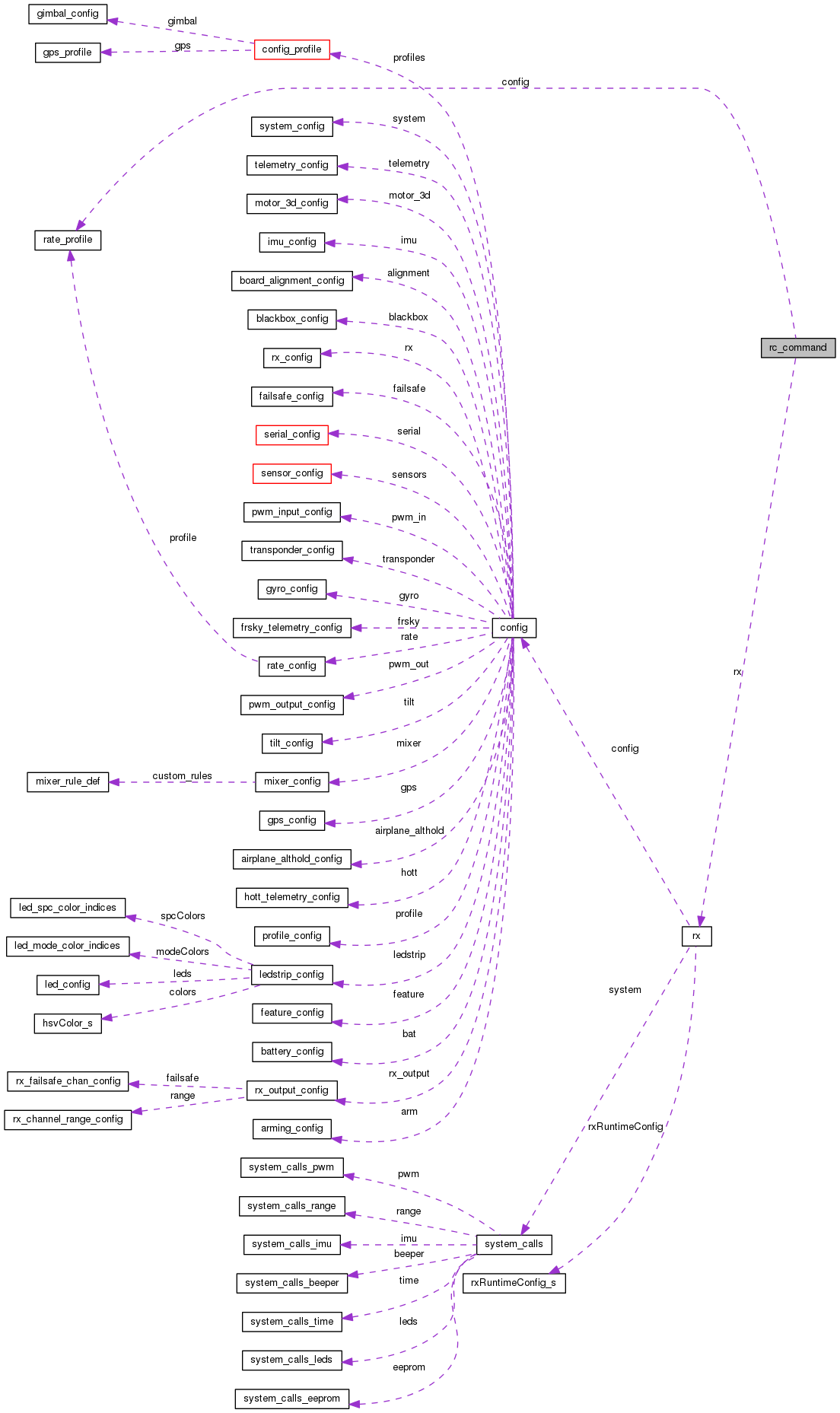
RC commands state. Inputs are raw commands in range [1000-2000]. Outputs are RC commands in range [-500;500] after applying expo and other parameters. More...
#include <rc_command.h>
Data Fields | |
| int16_t | roll |
| int16_t | pitch |
| int16_t | yaw |
| int16_t | throttle |
| int16_t | tpa |
| Throttle PID Addjustment. TODO: this really does not belong in this class. More... | |
| const struct rate_profile * | config |
| current rate config More... | |
| int16_t | lookup_roll_pitch [PITCH_LOOKUP_LENGTH] |
| lookup table for expo & RC rate PITCH+ROLL More... | |
| int16_t | lookup_yaw [YAW_LOOKUP_LENGTH] |
| lookup table for expo & RC rate YAW More... | |
| int16_t | lookup_throttle [THROTTLE_LOOKUP_LENGTH] |
| lookup table for expo & mid THROTTLE More... | |
| struct rx * | rx |
RC commands state. Inputs are raw commands in range [1000-2000]. Outputs are RC commands in range [-500;500] after applying expo and other parameters.
| const struct rate_profile* rc_command::config |
current rate config
| int16_t rc_command::lookup_roll_pitch[PITCH_LOOKUP_LENGTH] |
lookup table for expo & RC rate PITCH+ROLL
| int16_t rc_command::lookup_throttle[THROTTLE_LOOKUP_LENGTH] |
lookup table for expo & mid THROTTLE
| int16_t rc_command::lookup_yaw[YAW_LOOKUP_LENGTH] |
lookup table for expo & RC rate YAW
| int16_t rc_command::pitch |
| int16_t rc_command::roll |
| struct rx* rc_command::rx |
| int16_t rc_command::throttle |
| int16_t rc_command::tpa |
Throttle PID Addjustment. TODO: this really does not belong in this class.
| int16_t rc_command::yaw |
 1.8.7
1.8.7 
