|
NinjaFlight
|
|
NinjaFlight
|
#include <stdbool.h>#include <stdint.h>#include <platform.h>#include "system.h"#include "bus_i2c.h"#include "sensor.h"#include "accgyro.h"#include "accgyro_adxl345.h"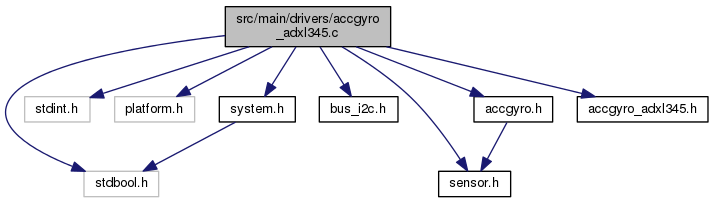
Macros | |
| #define | ADXL345_ADDRESS 0x53 |
| #define | ADXL345_BW_RATE 0x2C |
| #define | ADXL345_POWER_CTL 0x2D |
| #define | ADXL345_INT_ENABLE 0x2E |
| #define | ADXL345_DATA_FORMAT 0x31 |
| #define | ADXL345_DATA_OUT 0x32 |
| #define | ADXL345_FIFO_CTL 0x38 |
| #define | ADXL345_RATE_50 0x09 |
| #define | ADXL345_RATE_100 0x0A |
| #define | ADXL345_RATE_200 0x0B |
| #define | ADXL345_RATE_400 0x0C |
| #define | ADXL345_RATE_800 0x0D |
| #define | ADXL345_RATE_1600 0x0E |
| #define | ADXL345_RATE_3200 0x0F |
| #define | ADXL345_POWER_MEAS 0x08 |
| #define | ADXL345_FULL_RANGE 0x08 |
| #define | ADXL345_RANGE_2G 0x00 |
| #define | ADXL345_RANGE_4G 0x01 |
| #define | ADXL345_RANGE_8G 0x02 |
| #define | ADXL345_RANGE_16G 0x03 |
| #define | ADXL345_FIFO_STREAM 0x80 |
Functions | |
| bool | adxl345Detect (drv_adxl345_config_t *init, acc_t *accel) |
Variables | |
| uint8_t | acc_samples = 0 |
| #define ADXL345_ADDRESS 0x53 |
| #define ADXL345_BW_RATE 0x2C |
| #define ADXL345_DATA_FORMAT 0x31 |
| #define ADXL345_DATA_OUT 0x32 |
| #define ADXL345_FIFO_CTL 0x38 |
| #define ADXL345_FIFO_STREAM 0x80 |
| #define ADXL345_FULL_RANGE 0x08 |
| #define ADXL345_INT_ENABLE 0x2E |
| #define ADXL345_POWER_CTL 0x2D |
| #define ADXL345_POWER_MEAS 0x08 |
| #define ADXL345_RANGE_16G 0x03 |
| #define ADXL345_RANGE_2G 0x00 |
| #define ADXL345_RANGE_4G 0x01 |
| #define ADXL345_RANGE_8G 0x02 |
| #define ADXL345_RATE_100 0x0A |
| #define ADXL345_RATE_1600 0x0E |
| #define ADXL345_RATE_200 0x0B |
| #define ADXL345_RATE_3200 0x0F |
| #define ADXL345_RATE_400 0x0C |
| #define ADXL345_RATE_50 0x09 |
| #define ADXL345_RATE_800 0x0D |
| bool adxl345Detect | ( | drv_adxl345_config_t * | init, |
| acc_t * | accel | ||
| ) |

| uint8_t acc_samples = 0 |
 1.8.7
1.8.7 
