|
NinjaFlight
|
|
NinjaFlight
|
#include <stdint.h>#include <math.h>#include "build_config.h"#include "drivers/sonar_hcsr04.h"#include "sensors/sonar.h"#include "unittest_macros.h"#include "gtest/gtest.h"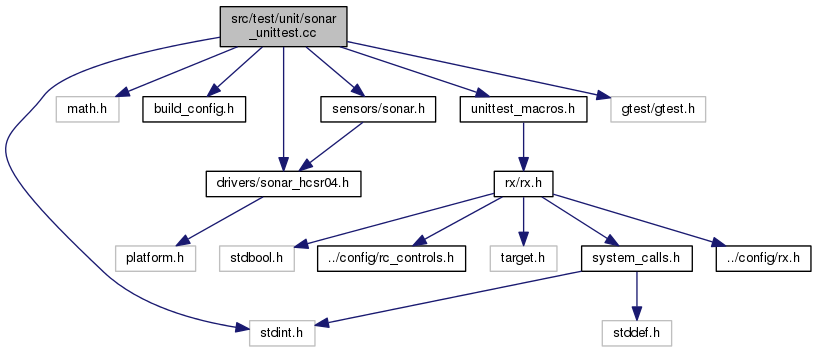
Macros | |
| #define | DECIDEGREES_TO_RADIANS(angle) (((angle) / 10.0f) * 0.0174532925f) |
Functions | |
| void | sonarInit (const struct sonar_hardware *sonarHardware) |
| void | sensorsSet (uint32_t mask) |
Variables | |
| int32_t | measurement |
| int16_t | sonarMaxTiltDeciDegrees |
| #define DECIDEGREES_TO_RADIANS | ( | angle | ) | (((angle) / 10.0f) * 0.0174532925f) |
| void sensorsSet | ( | uint32_t | mask | ) |
| void sonarInit | ( | const struct sonar_hardware * | sonarHardware | ) |
| int32_t measurement |
| int16_t sonarMaxTiltDeciDegrees |
 1.8.7
1.8.7 
